
Entwicklung eines Roboterbeins
Entwicklung eines Roboterbeins
Betreuer:
Prof. Dr.-Ing. Klaus-Dieter Kuhnert
Dipl.-Inform. Jens Schlemper
Bearbeiter:
Philipp Fuchs
Beschreibung
Gegenstand dieser Studienarbeit ist die Entwicklung eines Roboterbeines, welches in der Lage sein soll mit einer Last von 20 kg eine Kniebeugebewegung auszuführen. Zunächst wurde eine geeignete mathematische Beschreibung für den Bewegungsablauf der Kniebeugebewegung entwickelt. Aus dieser berechneten Trajektorie wurden durch Anwendung von Inversen-Kinematik die entsprechenden Winkelfunktionen ermittelt und mit MATLAB simuliert. Ausgehend von den vom Institut für Echtzeit Lernsysteme bereitgestellten Antrieben, wurden die mechanischen Komponenten des Roboterbeins mit den 3D-CAD-Programm Solidworks konstruiert. Die Ansteuerung des Roboterbeins erfolgte zunächst über ein IOIO-Microkontrollerboard, welches in C programmiert wurde. Der wesentliche Teil der Arbeit beschäftigt sich mit der Untersuchung und Bewertung von Ansteuerungskonzepten für die Kniebeugebewegung. Dabei geben die bei den Untersuchungen gemachten Messungen Aufschluss über die Qualität des jeweiligen Verfahrens.
Umsetzung
Bewegungsablauf:
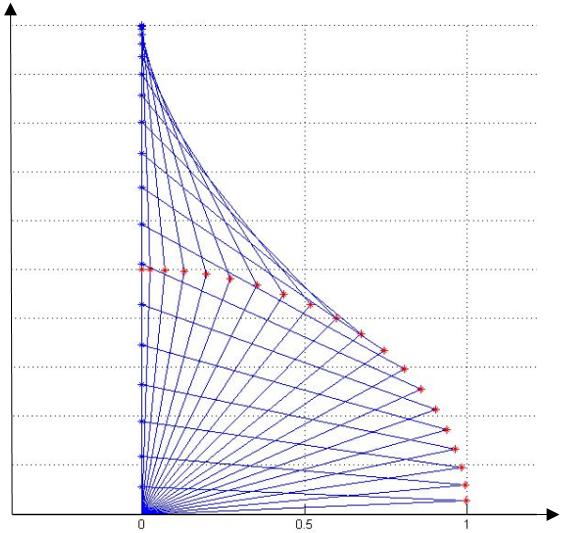
Abbildung 1: Bewegungsablauf
Abbildung 1 zeigt einen mit MATLAB simulierten und vereinfachten Ablauf einer Kniebeugebewegung. Zwischen dem ausgestreckten Zustand und dem eingeknickten Zustand des Beines sind weitere Zwischenzustände des Bewegungsablaufes dargestellt. Diese interpolierten Zwischenzustände der Bewegung, veranschaulichen den nichtlinearen Zusammenhang der Winkeländerungen bezüglich der Lage des Punktes auf der Ordinatenachse.
Konstruktion:
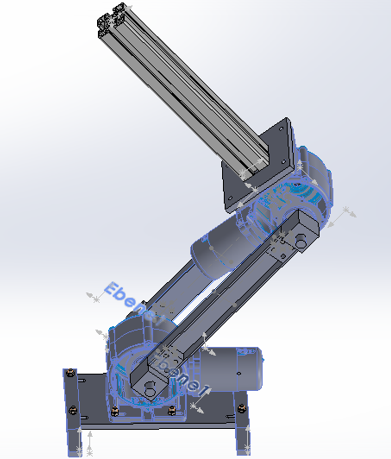
Abbildung 2: Konstruiertes Roboterbein
Abbildung 2 zeigt die fertige Konstruktion des Roboterbeines. Wie zu sehen ist, ist der Aufbau und die Proportionierung dieses Beins dem des Menschen nachempfunden, sodass einen dem menschlichem Bein ähnliche Bewegung vollführt werden kann. Der Antrieb des Beins wird durch zwei Gleichstrommotoren mit Getriebe realisiert. Die Motoren werden mit Hilfe eines Mikrocontrollers und Motortreibern angesteuert. Die Auslenkungen der Motoren werden dabei über Winkelsensoren erfasst.
Versuchsaufbau:
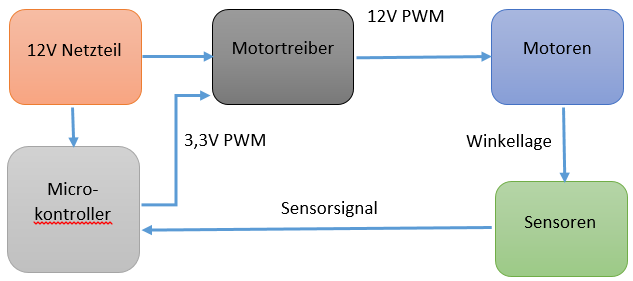
Abbildung 3: Versuchsaufbau
In Abbildung 3 ist der Versuchsaufbau vereinfacht dargestellt. Das Microkontrollerboard generiert 3,3V Pulsweitenmodulation, welche über einen Motortreiber verstärkt wird. Diese Verstärkung ist notwendig, da die Motoren eine Versorgungsspannung von 12V benötigen. Zwischen dem einlesen der Sensorsignale und der PWM-Erzeugung, befindet sich eine programmierte Positionsregelung. In Abhängigkeit der Ist- und Sollwerte der Sensoren berechnet diese Regelung einen jeweiligen Wert für die PWM. Nachdem das Roboterbein als Regelstrecke analysiert wurde, wurde ein PI-Regler für diese Umsetzung gewählt.
Untersuchung:
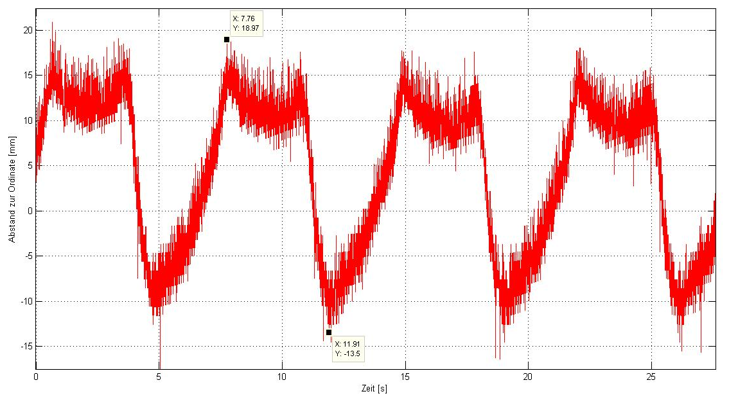
Abbildung 4: Genauigkeit der Bewegung
Wie zuvor erläutert, sollte das Roboterbein auf einer geraden Achse auf und ab fahren, was einer Kniebeuge entspricht. Um eine Aussage über die Güte des Bewegungsablaufes machen zu können, wurde der tatsächliche Abstand des definierten Hüftpunktes zur Bewegungsachse während der Bewegung gemessen. Diese Messung ist in Abbildung 4 zu sehen und zeigt vier hintereinander folgende Kniebeugebewegungen. An der Ordinate ist die Abweichung in Millimeter angegeben. Der maximale Fehler liegt kurzzeitig bei 18mm. Untersuchungen haben gezeigt, dass für eine exakte und harmonische Bewegung eine Kopplung zwischen den Motoren empfehlenswert ist.