fusion2d3d
Erzeugung eines texturierten 3D-Modells aus 3D-Tiefendaten und 2D-Bilddaten für die lokale Kartierung mit dem Außenbereichsroboter AMOR
Betreuer:
Prof. Dr.-Ing. K.-D. Kuhnert, Dipl.-Inform. Lars KuhnertBearbeiter:
Johannes LeidheiserBeschreibung:
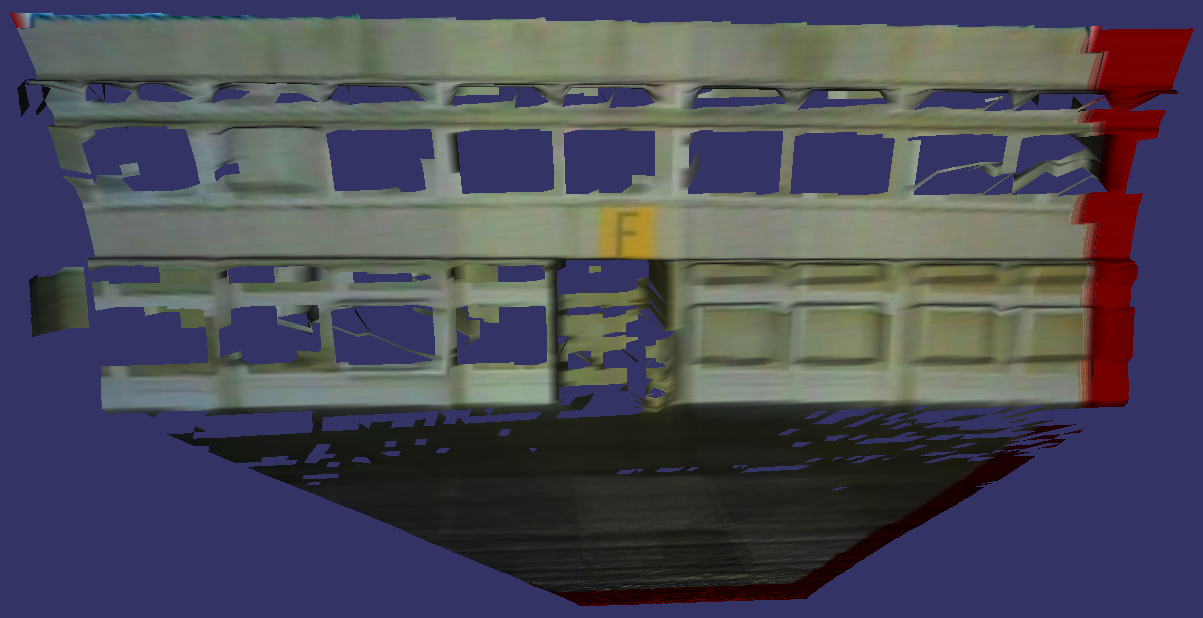
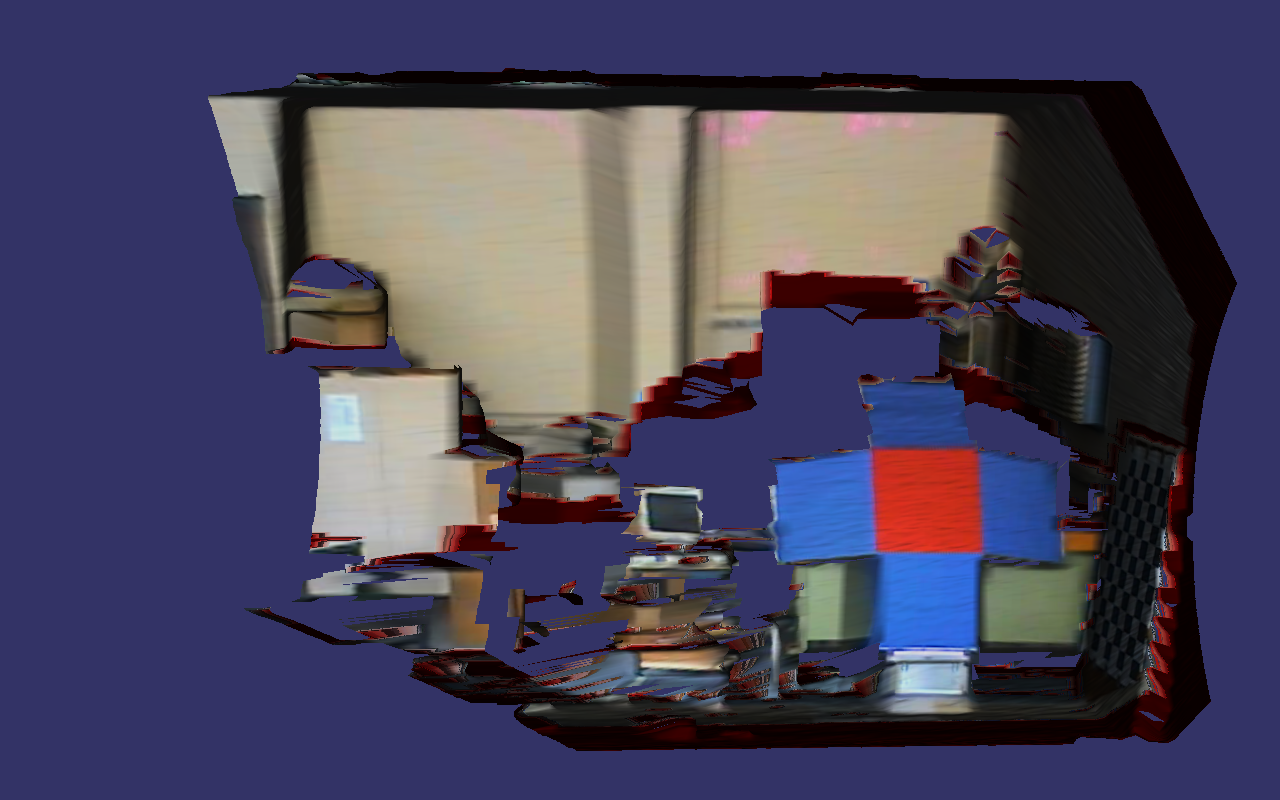
In dieser Diplomarbeit wurde eine Software entwickelt, die dreidimensionale Modelle der Umgebung des Außenbereichsroboters AMOR erstellt. Ein schwenkbarer Laserscanner an der Front von AMOR liefert dazu dreidimensionale Koordinaten, welche die Geometrie der Umgebung beschreiben und eine Kamera liefert die Farbinformationen, welche dazu genutzt werden die Modelle einzufärben beziehungsweise zu texturieren.
Die Modelle werden erzeugt, indem die sphärischen Koordinaten, die der Laserscanner liefert, mithilfe einer Funktion aus einer vorangegangenen Diplomarbeit in kartesische Koordinaten umgewandelt werden. Um nicht nur eine Punktwolke, sondern eine Geometrie zu erhalten werden die kartesischen Koordinaten nach dem Scanline-Prinzip zu Dreiecken verbunden.
Um die Zuordnung von Bildpunkten eines Kamerabildes zu dreidimensionalen Koordinaten eines Modells automatisch herzustellen, wurde die verwendete Kamera mit einem Schachbrettmuster kalibriert, so dass ihr Abbildungsvehalten mathematisch beschrieben werden kann. In einer zweiten Kalibrierphase wurde mit einem dreidimensionalen Kalibrierobjekt die relative Position und Orientierung der Kamera zum Laserscanner bestimmt. Die aus den beiden Kalibrierphasen erhaltenen Informationen wurden dazu genutzt, die kartesischen Koordinaten eines Modells auf das Bild der Kamera zu projizieren um so die gewünschten Farbinformationen zu erhalten. Um eine möglichst gute Texturierung der Modelle zu erreichen, wurde ein Sichtbarkeitstest implementiert, mit dessen Hilfe sichergestellt wird, dass nur Teile eines Modells texturiert werden, die aus der Perspektive der Kamera sichtbar sind. Die Geometrie der Modelle wurde verbessert indem Dreieck entfernt wurden, die durch das Scanlines-Verfahren entstehen, aber das Modell tendenziell verschlechtern. Solche unerwünschte Dreiecke verbinden den Vordergrund zum Beispiel einen Stuhl mit dem Hintergrund zum Beispiel einer Wand.
Zusätzlich wurde eine Lokalisierung des Roboters implementiert, die es ermöglicht mehrere aufgenommene Modelle in einem globalen Koordinatensystem zu positionieren. Dadurch ist es zum Beispiel möglich AMOR einen Kreis abfahren zu lassen und an mehreren Stellen dieses Kreises Modelle zu erzeugen. In einem globalen Koordinatensystem ergeben diese einzelnen Modelle dann eine Panoramaansicht der Umgebung.
Visualisiert wurden die Modelle unter Verwendung der Softwarebibliothek OpenSceneGraph, die auf OpenGL aufsetzt. Die implementierte Software wurde für Ubuntu-Linux unter C++ entwickelt.