Entwurf und Entwicklung eines auf mehreren µC basierenden Teleoperationssystems für die Sicherheit des mobilen Roboters AMOR
Betreuer:
Prof. Dr.-Ing. K.-D. Kuhnert, Dipl.-Inf. Markus AxBearbeiter:
Bahman BromandBeschreibung:
Bei dieser Diplomarbeit sollte ein Not-Ausschalter über
Funk für den mobilen Robotor AMOR implementiert werden. Für
die Realisierung dieser Aufgabe sind zwei räumlich
getrennte Steuereinheiten entwickelt worden. Eine für das
Handgerät, mit der der Not-Aus für AMOR ausgeführt werden
kann sowie eine für die Basisstation, die den Befehl
entgegennimmt, um dann den Not-Aus in AMOR auszulösen. Des
Weiteren waren zwei zusätzliche Schaltungen gefordert, mit
der zum Einen die Batterie im Handgerät aufgeladen werden
kann sowie eine Schutzschaltung, die die Funkmodule vor
Überspannung und Kurzschlussstrom schützen soll. Die
Schaltungen wurden zunächst mit dem Simulationsprogramm
LTSPICE von der Firma Linear Technologie entworfen und
anschließend wurden die entwickelten Schaltungen mit Hilfe
des Programms Eagle für die Fertigung der Platinen designt.
Funkfernbedienung
Die Funkfernbedienung wurde mit einem Grafikdisplay
ausgestattet, welches unter anderem folgende Informationen
anzeigt:
- Batterieanzeigestatus
- Qualität der Funkverbindung zwischen den beiden Steuereinheiten
- Nachrichten von Anwendungen, die auf AMOR laufen
Die Funkfernbedienung wird mit einem Akku betrieben, der einen Betrieb von mindestens 4 Stunden sicherstellt. Um diese Laufzeit zu erreichen wurden die Komponenten (Hardware) so gewählt, dass ein energiesparsamer Betrieb gewährleistet ist. Des Weiteren wurde bei dem Hardware-Entwurf des Handgerätes darauf geachtet, dass die Batterie wiederaufladbar ist. Ferner wurden folgende Elemente in das Gehäuse integriert:
- Ein-/Ausschalter für das Handgerät
- Folientastatur
- Schalter zur Betätigung des Not-Aus über Funk in AMOR
Da es sich bei AMOR um ein Outdoor-Fahrzeug handelt, ist das Gehäuse der Funkfernbedienung wasserdicht.
Steuereinheit in Amor
Die Steuereinheit in AMOR, die für den automatischen
Not-Ausschalter zuständig ist, soll mit anderen im System
integrierten Steuerkomponenten kommunizieren können, um
über Funk die Informationen zu übertragen, welche dann auf
dem Display der Fernbedienung angezeigt werden. Um diese
interne Kommunikation zu ermöglichen, ist ein
Ethernet-Controller auf der Platine der Steuereinheit
integriert. Diese beiden Einheiten kommunizieren
kontinuierlich miteinander. So wird gewährleistet, dass bei
schlechter oder bei gar keiner Funkverbindung automatisch
die Not-Aus-Funktion bei AMOR ausgelöst wird, um so Schäden
an AMOR und der Umgebung zu verhindern.
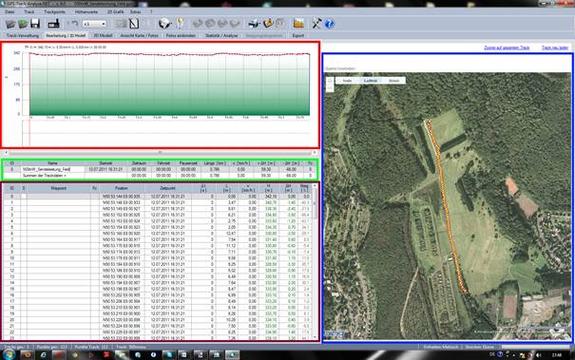
Ergebnisse
Abbildung 1 zeigt das Handgerät und Abbildung 2 die Steuereinheit für den AMOR. Beide Steuereinheiten sind mit einem wasserdichten Gehäuse ausgestattet und somit für den Outdoor-Einsatz geeignet. Abbildung 3 zeigt einen Screenshot des Programms GPS-Track-Analyse.Net, welcher die Ergebnisse des Reichweitentests der Steuereinheiten veranschaulicht.
|
Abbildung 1: Handgerät |
Abbildung 2: Steuereinheit in AMOR |
|
Abbildung 3: Reichweitentest der Steuereinheiten mit GPS-Track-Analyse.Net
|
|