Longitudinal and lateral trajectory planning for automated cooperative vehicles
|
The continuous increase in number of vehicles worldwide has increased research activities in the automotive domain. Besides other topics current research projects pursue the objective to support the driver during vehicle guidance or to automate the vehicle completely. |
||||
|
|
||||
|
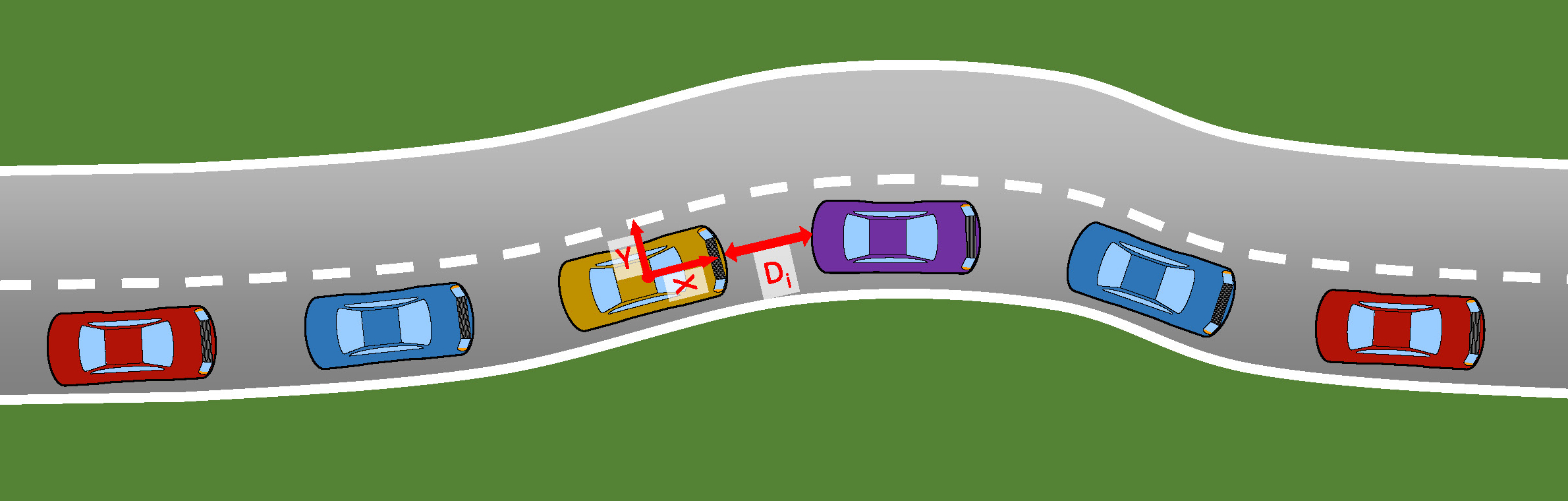
In the field of Advanced Driver Assistance Systems, longitudinal (x-axis) and lateral (y-axis) vehicle control has been and is one of the central topics of research. The higher the number of vehicles, the higher is the probability of stop-and-go traffic and traffic congestion. Such congestion problems are solvable if the vehicles of a convoy would maintain an optimal distance (Di) to the preceding vehicle. The most important criteria which the vehicles of a platoon should maintain for its smooth operation are: individual vehicle stability, string stability, traffic flow stability and most importantly free of collisions. Partly automated vehicles, with the accepted methods for lateral and longitudinal control, like adaptive cruise control or lane following control, as currently offered by the automotive industries in the market are stable enough to provide individual vehicle stability under defined conditions. However, they are not optimal to provide string stability and traffic flow stability under different driving scenarios. With Vehicle-to-Vehicle communication, the possibility to maintain the collective stability criteria increases. |
||||
|
|
||||
|
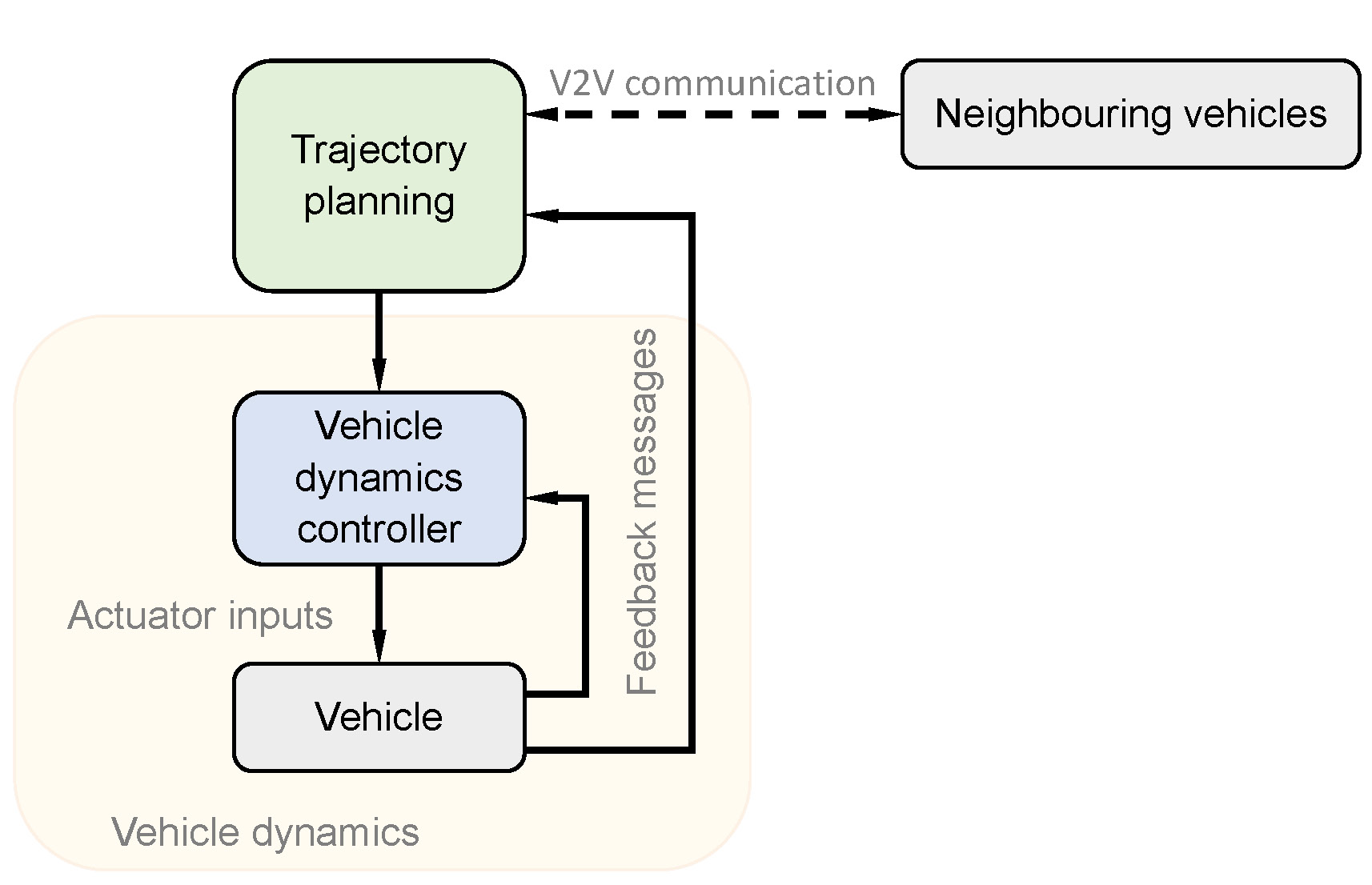
Within the scope of this research project an algorithm for longitudinal and lateral trajectory planning should be developed, considering the vehicle dynamics in the lower level of the overall automatic control system’s architecture, which fulfils the criteria mentioned on top. |
||||