
Walking Robot
Modeling, Gait Design and Analysis of a Load-Carrying Biped Robot
Under supervision of:
Supervisor: Prof. Dr.-Ing. Klaus-Dieter Kuhnert
Co-advisor: Dipl.-Inform. Jens Schlemper
Submitted by:
Franklin Chinazom Obika (M Sc. Mechatronics)
Abstract
In the past few decades, there has been a need to design machines with human characteristics, machines that can interact with humans and operate in human environment, so that some of the difficulties, complexities and safety issues involved in certain human activities can be in some measures addressed. This need for machines that can function as humans and carryout tasks as humans do, has led to various researches in biped robotics. Many design methodologies for biped robots have been successfully formulated but not without some drawbacks, hence, the search for more effective methodologies for biped design is still ongoing, with new methodologies presently explored and proposed.This research focuses on static walking design of a duty (load-carrying) biped robot, with a heuristic approach to the design.The physical realization of the biped to be designed is a major design requirement and forms the basis upon which design assumptions and considerations are made.
Research Objective
The search for a more efficient gait design methodology for biped robots is still ongoing as researchers endeavor to improve on known methodologies and also endeavor to propose new methodologies. This research looks to take a heuristic approach to the design of a static stable gait for a biped robot. The biped’s torso is a bucket which is meant to carry a maximum payload of about 20kg. The biped should effectively walk statically and periodically on a flat and plain floor while carrying the given maximum payload without losing its stability.
Design Description
This research focused on the design of a biped static walker, with load-carrying capability. The first part of the design focused on the development of a CAD model for the biped robot, with known design requirements and considerations, a successful conceptual design was achieved which led to the generation of the CAD model of the biped robot. The biped robot which is made up of a Bucket, two Upper Links, two Lower Links and two feet has a total of 10dofs (degrees of freedom) and stands at a height of 718.33mm with a width of 570.24mm. A CAD model of the floor on which the Biped should walk on, was also developed.
|
Stretched Knee POSE (Position and Orientation) |
Bent Knee POSE |
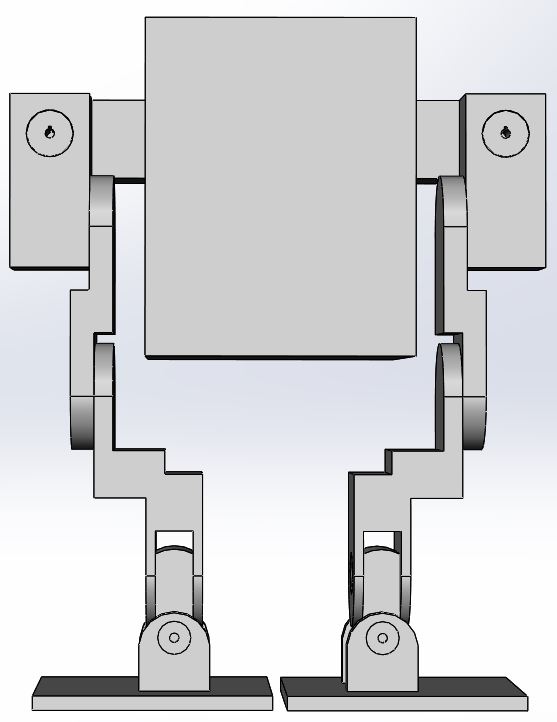
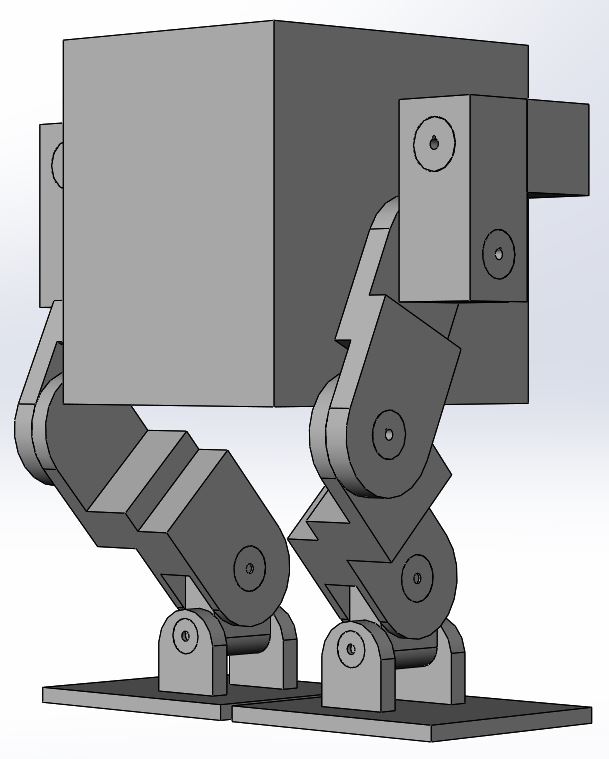
Model of the Biped Robot developed in Solidworks
The second part of the design involved the gait design for the biped robot. The CAD model which was developed in SolidWorks was exported to SimMechanics where the gait design and simulation of the biped robot was carried out. SimMechanics which is part of the Simscape library in Simulink was preferred to SolidWorks for gait design of the biped robot as it better supports static design by enabling configurations that ensure that the dynamics of the robot is kept at the very minimum during simulation.
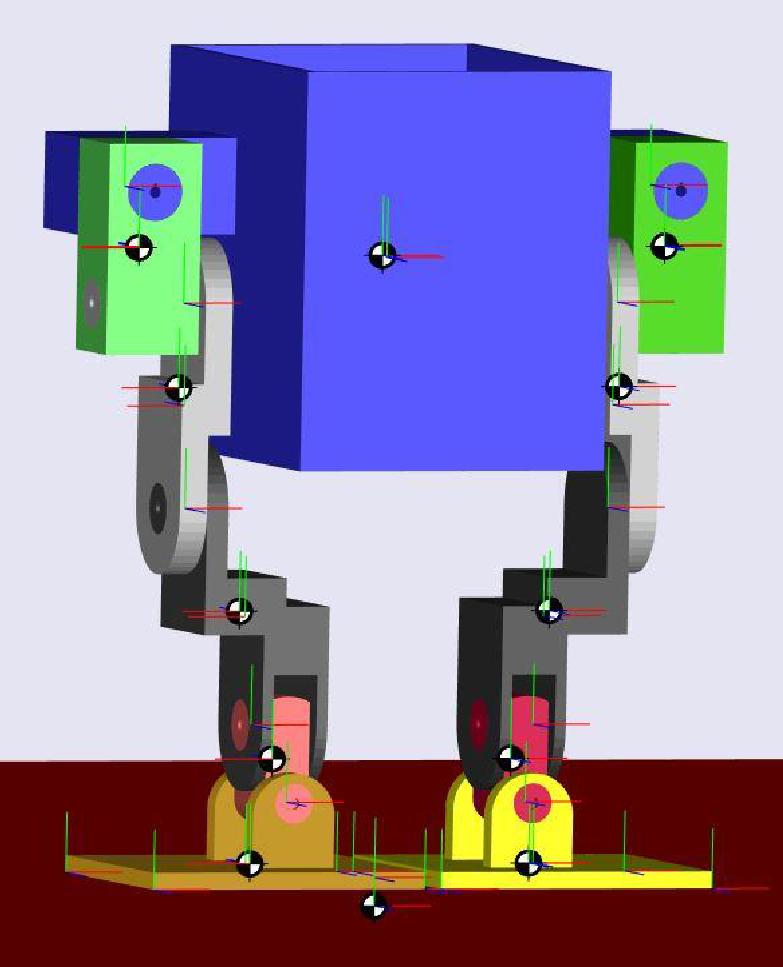
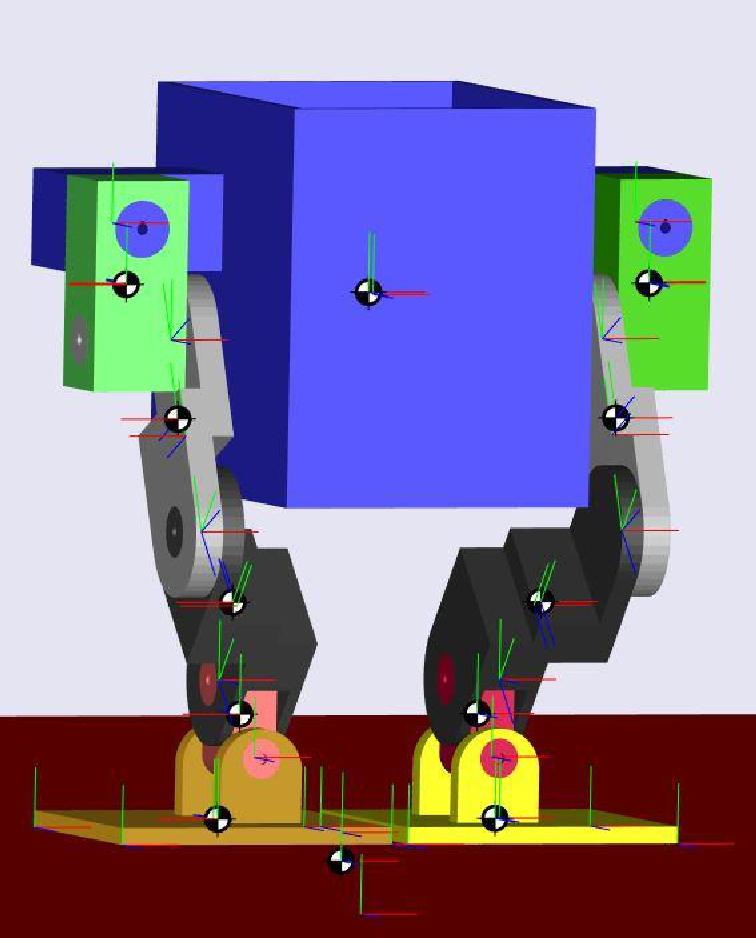
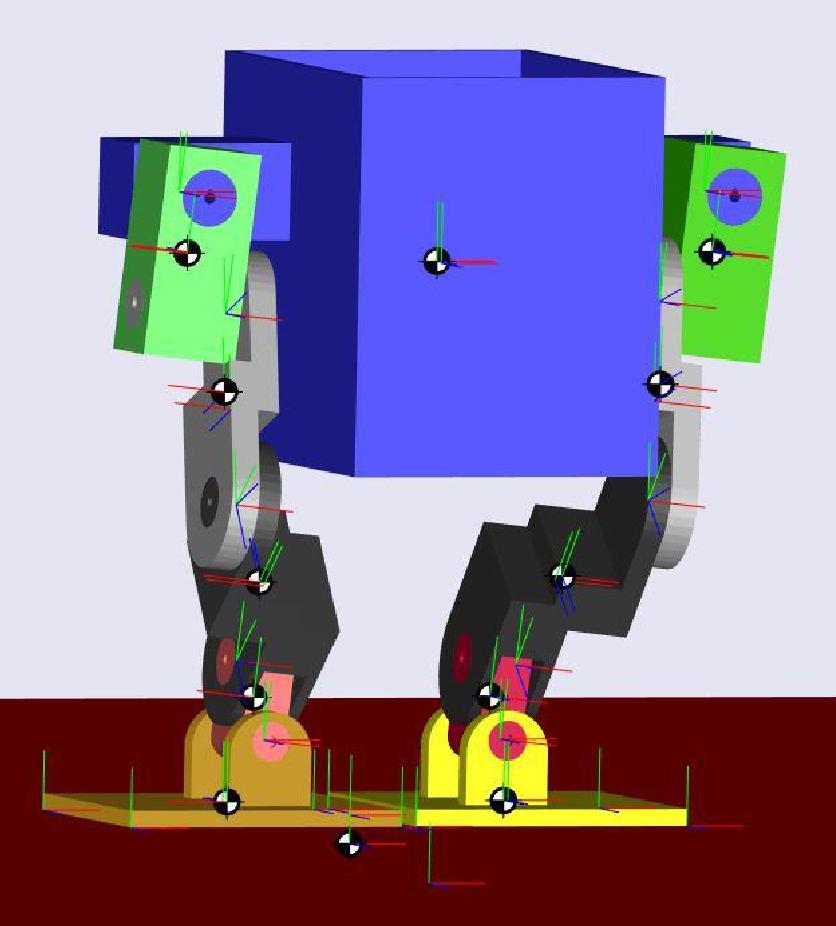
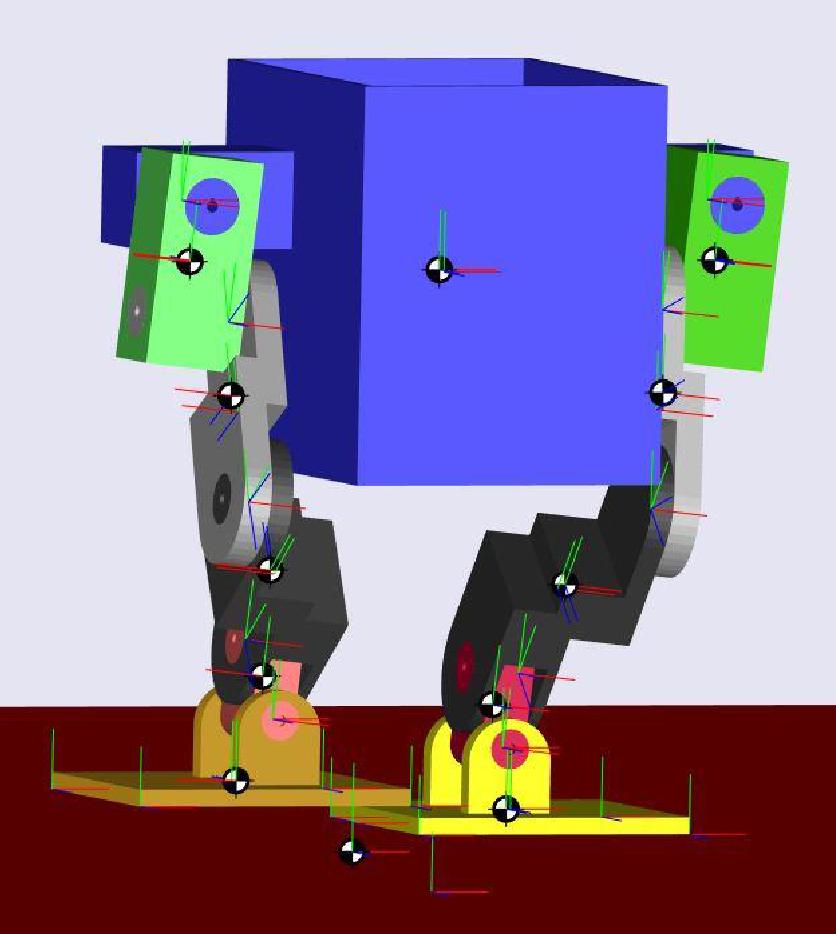
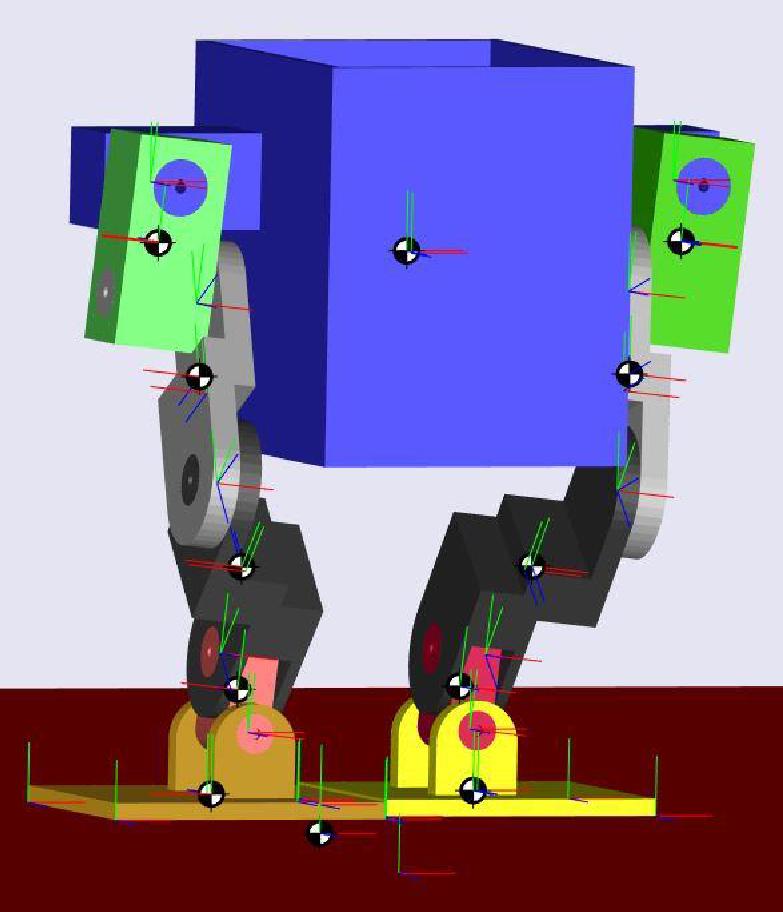
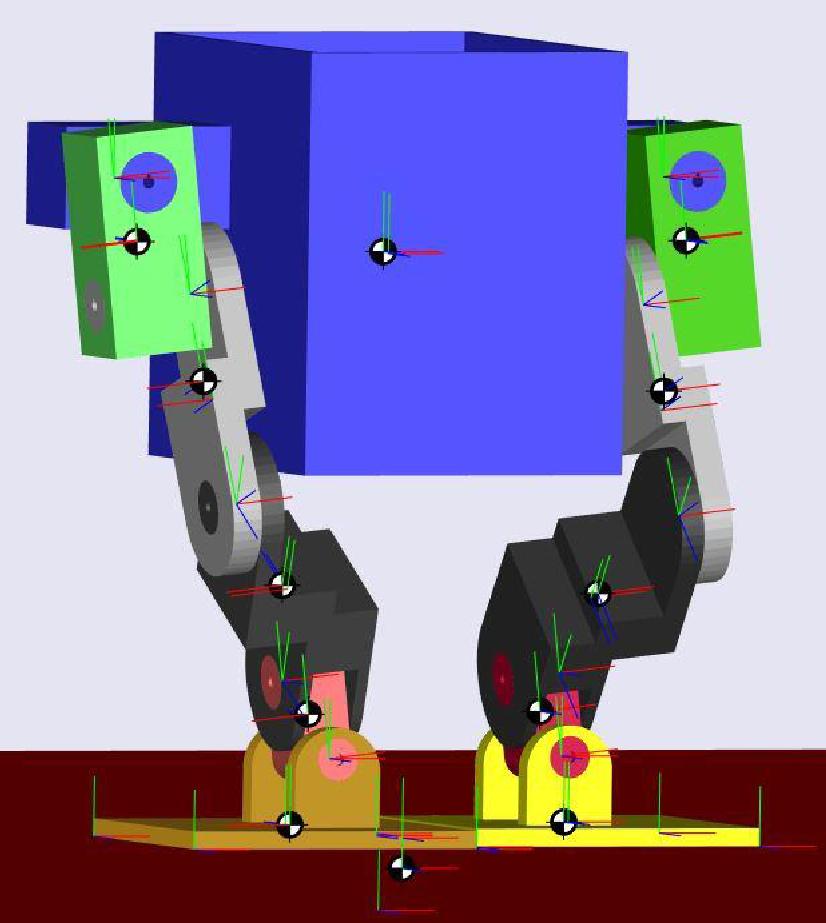
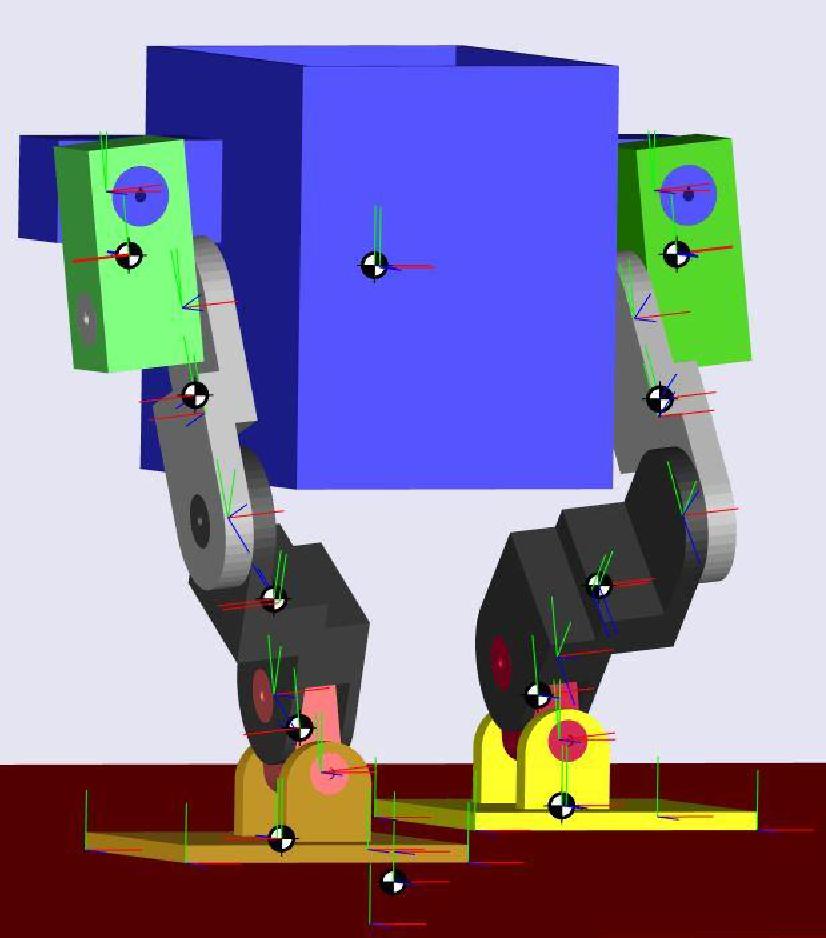
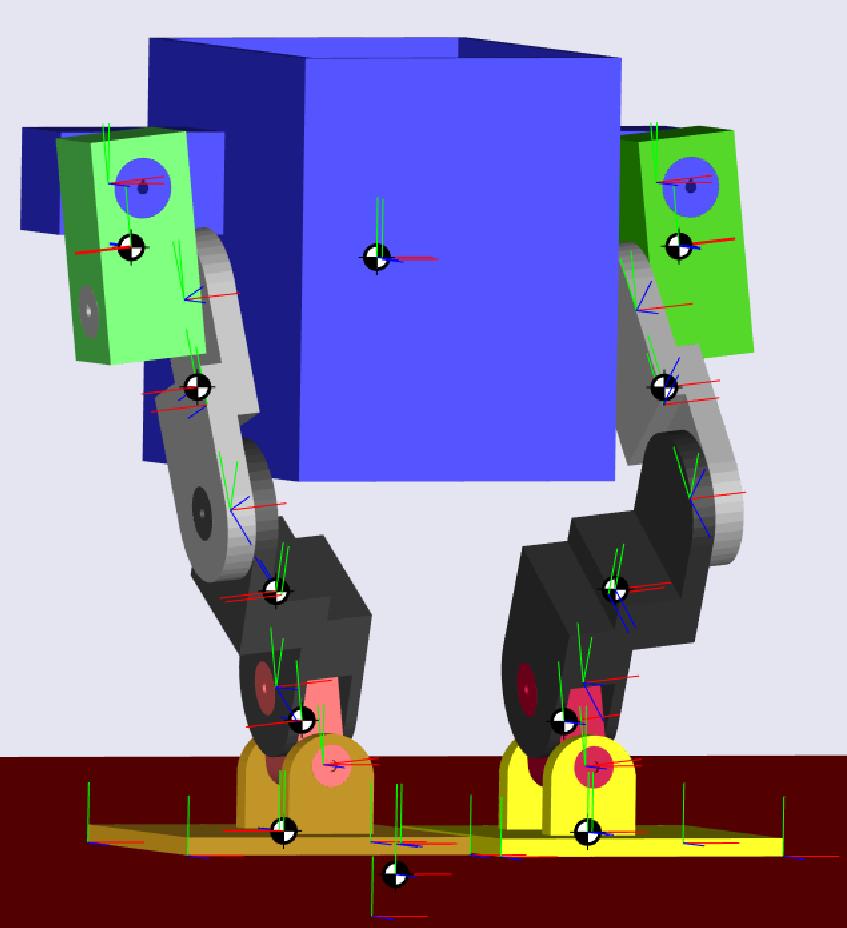
|
Stretched Knee POSE |
Bent Knee POSE |
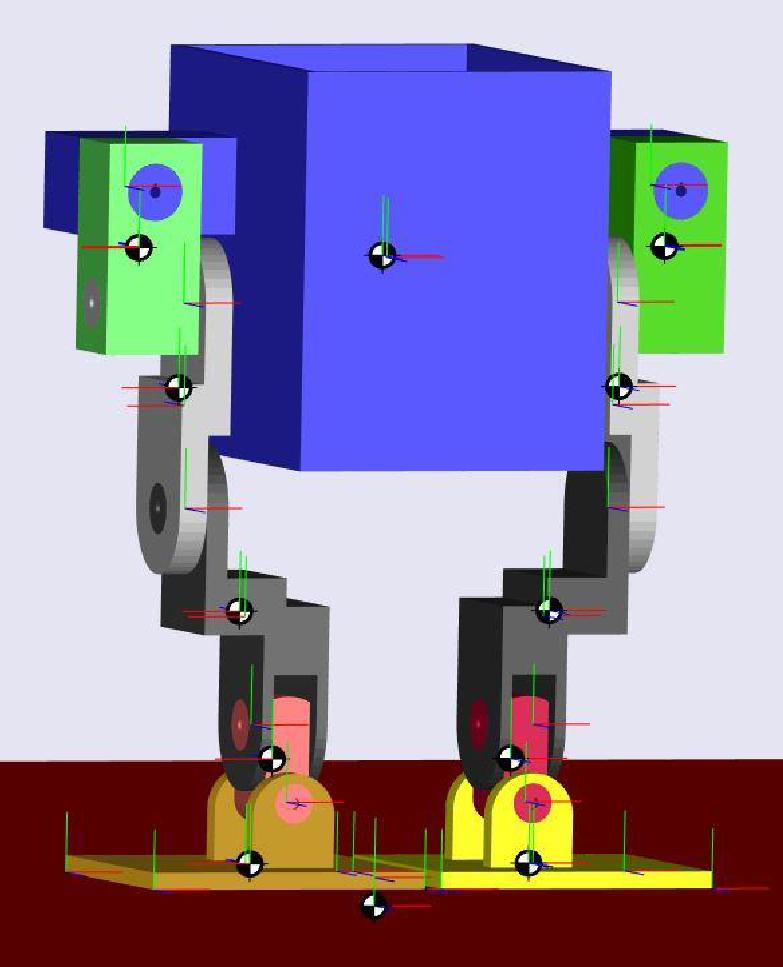
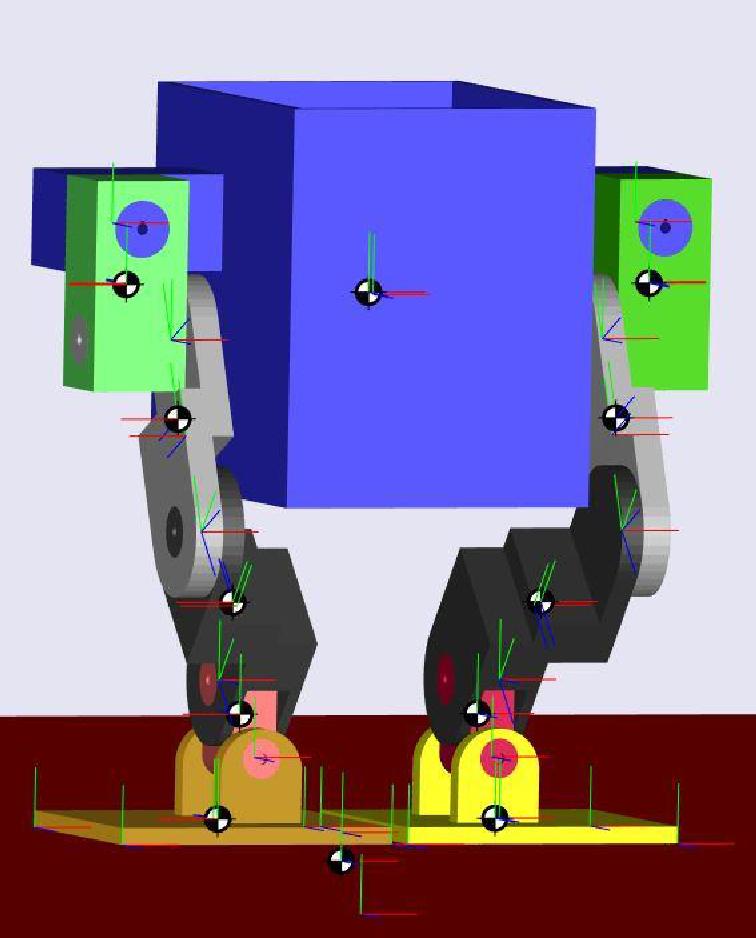
Model of the Biped Robot developed in SimMechanics
In SimMechanics, the adjustments of the CAD model parameters were done before the actual gait design. The gait design involved no known methodology but instead a heuristic (trial and error) approach was taken. Forward kinematics approach was employed in the gait planning as the links parameters are known as well as the joint parameters which were strategically selected by the designer. The walking gait has a start phase and a periodic phase, and with the gait parameters strategically selected for both phases, the biped robot was simulated.
 |
 |
 |
 |
 |
 |
 |
 |
Result
The final part of the design gave the assessment of the simulated biped robot. The main requirement for assessment of the biped static walking is that the Ground Projection of the Center of Mass (GPCoM) of the biped should always reside in the support polygon during walking. The support polygon is given by one foot of the Biped in the Single Support Phase (SSP) and by the area surrounding both feet in the Double Support Phase (DSP). Analysis of the simulation results show a successful design as the main requirement of a statically stable walking biped robot was met. The designed biped robot walks with a step length of 35mm at 7.5s step time, also it walks with a stride length of 70mm with a stride time of 15s and walks with an average speed of 105mm/min. The stride length majorly determines the ability of the biped robot to shift its Center of Mass (CoM) from one foot onto another foot in a double support phase, the larger the stride length the more difficult it becomes to shift the CoM. It was also noted that the choice of profile of joint motion is essential to achieving the desired stable static walking of the biped robot. To further illustrates the success of the design, a short video as given below was made, which shows that the GPCoM of the biped robot resides always in the support polygon during locomotion; as this is the criterion needed to be satisfied for static walking, it can then be concluded that a successful stable static walking of the designed biped robot was achieved.