Design and Development of Modular Multipurpose Omnidirectional Autonomous Mobile Robotic Platform for Remote Farming Application
Description
The sole aim of the thesis is to develop an experimental virtual 3D-digital Prototype of modular Autonomous Mobile Robotic Platform (AMRP) for data acquisition, research and implementation of advanced remote technology (e.g. GPS, WIFI) and sensing technology for agriculture needs (e.g., weed cutting, pesticide). Flying drones or Unmanned aerial vehicles (UAVs) can cover large agriculture field quickly and accurtely. The informations, provided by UAVs and sensors as well as setelite are used by automated mobile vehicles to apply, seeds, water, herbicides, and nutrients more targeted and timely way. The robotic base platform presents a multifunctional characteristic such as adjustable ground clearance and track width with omnidirectional mobility. The systematic mechanical design approach with proper implementation can result into a multi-degree of freedom system which is robust and rugged. A systematic mechanical design approach plays a key role to achieve a multi-degree of freedom, robustness and ruggedness of structure results in improved drivability in the various types of terrain.
The scope of the thesis is focused mainly on the design and development of a robust mechanical platform for autonomous omnidirectional movement, which can offer a high degree of mobility. The whole robot has been designed using the 3D digital virtual prototyping methodology. It involves using CAD (PTC Creo 2.0) and CAE (ANSYS 15.0) software to validate the design before committing to make a physical artifact. A full documentation of the mechanical design of the various mechanical modules from initial conceptual modelling to the final optimized design of AMRP is developed using PTC Creo 2.0. Furthermore, the critical parts of the robot are also analysed using FEA based technique with the help of ANSYS 15.0 and are simulated using PTC Creo Simulation Module.During designing procedure some factors are heavily considered such as:
- The simplicity of mechanism and mechanical system
- High robustness
- Usage of standard components
- High weight to load carrying capacity ratio
- Consistent autonomy with agricultural needs
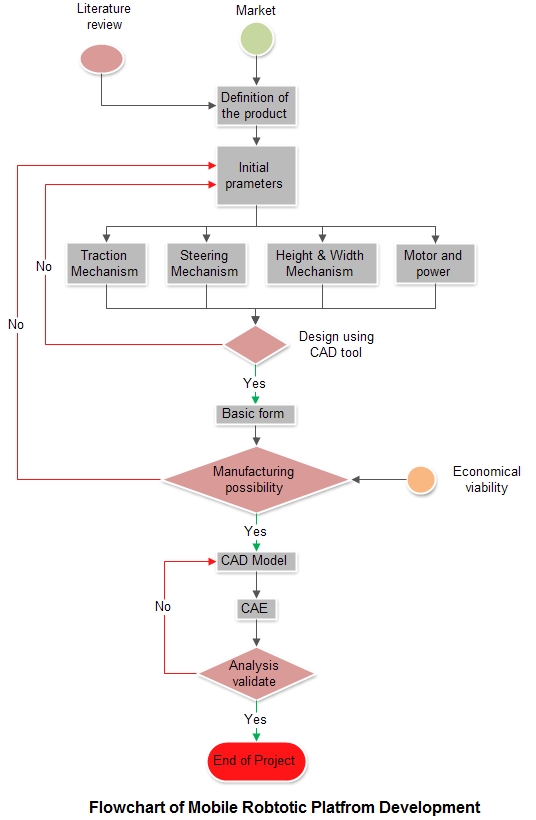
The development of the project followed the flowchart as shown below:
Result
Modular AMRP is developed by keeping in mind agricultural application. It is based on:
- 4WD (Four Wheeled Drive)
- 4WS (Four Wheeled Steering)
- DC Gearmotor technology
- Batteries for power supply
- Capable of overcoming obstacles
Key features of design:
- Adjustable track width
- Adjustable ground clearance
- Sideway move and on the spot 360˚ turn
- Higher mobility
- Robustness
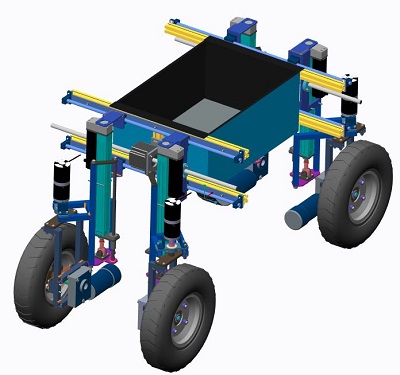
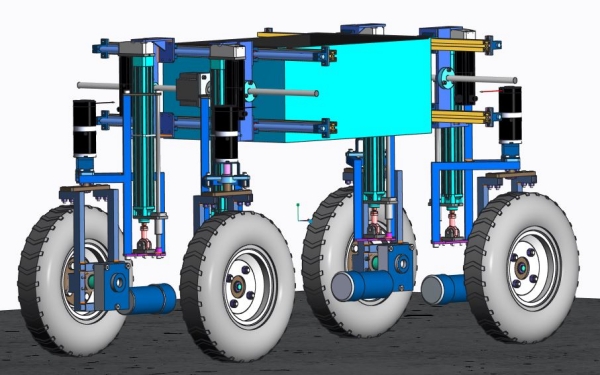
Whole design or construction of the autonomous omnidirectional mobile vehicle was engineered with a full focus on robustness, reusability, and multi-degree-of-freedom (MDOF), which prove them better over conventional (i.e., 2-DOF) vehicle. For example, MDOF vehicle can travel sideway, skew, and is able to take on the spot 360˚ turn as well negotiate tight turn more easily, which provide ease to move safely in meaningful and purposive manner in between rows and columns of crops . Each wheel is propelled and steered by an individual motor, which provide ease to control it.
The below Figures show final developed Mobile Robotic Platform.