
Walking Robot
Mechanical Design, Modeling and Analysis of weight carrying Bipedal Walking Robot
Under supervision of:
Prof. Dr.-Ing. Klaus-Dieter Kuhnert
Dipl.-Ing. Jens Schlemper
Submitted by:
Pravin Erande (M Sc. Mechatronics)
Abstract
During last few years, the number of research and development projects aimed at building bipedal robots has been increasing at a rapid rate. However, a search through literature reveals about the mechanical design of Bipedal robots. There are limits on, among other thing the actuator size and the weight. Bipedal walking robots have distinguished themselves from other robots not only for their better mobility but also for the increased amount of complexity in their architecture. This research is based on a mechanical design and development of bipedal walking robot.
Objective
Since many years, Scientists and Engineers have been working on the designing of robot, balancing of robot during walk, controlling the actions during walk and climbing stairs etc. Moreover, controlling robot actions and balancing of robot during walking, climbing stairs, walking on inclined plane is quite challenging tasks. Some scientists are successful in these kinds of Robots. Instead, there are very few robots (such as Asimo Honda, HRP etc.) in the today’s market they can fulfill the needs of humans as well as they can assist the humans in some extent. The objective of the thesis is to design and develop a robot mechanically in such way that robot can walk on the three different surfaces such as plain ground, inclined ground and stairs along with the weight or some heavy stuffs.
Description
The Mechanical design forms the basis for developing this type of walking robots. The mechanical design is divided into two phases. A: Determining the Mechanical constraints. B: Modeling of Bipedal walking robot
Determining the Mechanical Constraints
There are various design considerations when designing a bipedal robot. Among them, the major factors that have to be considered are Robot’s size selection and Degrees of freedom (D.O.F) selection.
Robot Size Selection
Robot size plays a major role. Based on this the Cost of the project, Materials required for fabrication and the no of actuators required can be determined. In this project miniature size of the robot is preferred so a height of 945 mm is decided which includes mounting of the control circuits, but the actual size of the robot is 770 mm without controlling circuits.
Degrees of Freedom (D.O.F)
Human leg has six Degrees of freedom ( Hip – 3 D.O.F, Knee – 1 D.O.F, Ankle – 2 D.O.F) but implementing all the six D.O.F is difficult due to increase in cost of the project and controlling of the actuators which become complex, so in this project reduced degrees of freedom is aimed so 4 D.O.F per leg has been finalized.
Modeling of Bipedal walking robot
Modeling is one of the most vital part of the designing a robot. Design engineer can build the model into the CAD Software and can see whether the design of the robot is right or it require necessary changes and If required, can change the CAD- model in software itself. So, it improves the accuracy in the design. As far as Bipedal walking robot is concerned, the model of robot is built into CATIA V5 and made changes according to requirement.
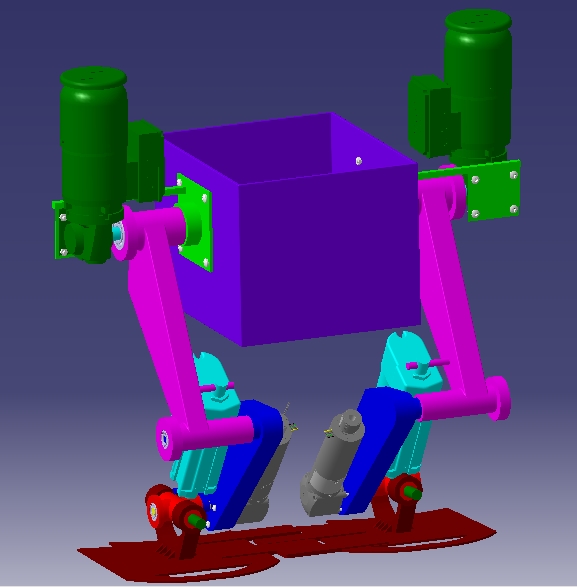
Catia Modeling diagram

Rendering diagram
Result
As per design standards, designed and modeled all parts of robot such as – Storage box, Upper leg, Lower leg, Shaft, Foot, Bearings and Four way socket. Besides, analytically calculated all kind of forces, moments and stresses on these parts. Moreover, calculated Von mises stress, Displacement and Precision of the parts by using Catia V5 and compared these results. As a result, all parts are safe. Moreover, In the case of ankle joint, maximum torque at the ankle is 48.29 N-m which is well under the selected motor torque 50 N-m 427.40 lb-in. In the case of knee joint, torque at the knee joint is 75.014 N-m which is well under the selected linear actuator torque 113 N-m. In the case of hip joint, the maximum torque at hip joint 92.16 N-m which is well under the selected motor 98.97 N-m (876 lb-in). Overall cost of the robot is € 6,167.74 (As per calculations and quotation from the vendors).