
Design and Implementation of Wireless based Indoor Localization System on a Mobile Robot
Under supervision of:
Supervisor: Prof. Dr.-Ing. Klaus-Dieter Kuhnert
Co-advisor: Dipl.-Inform. Jens Schlemper
Submitted by:
Gokulakrishnan Sivakumar (M Sc. Mechatronics)
Introduction
The objective of this thesis is to develop and implement a reliable wireless based indoor localization system on a mobile robot. In recent days, it has become popular to utilize the wireless technologies to collect location information of indoor environments. For an autonomous mobile robot to navigate through an indoor environment, it is necessary to position themselves. So, an efficient solution is provided to estimate the location of an indoor mobile robot using wireless technologies. Our work mainly focuses on the WiFi signal strength based positioning systems such as trilateration and fingerprinting method using database and interpolation. The received signal strength indicator (RSSI) based trilateration method has chosen because it does not require time synchronization, it supports NLOS and the accuracy is comparatively good than time and angle based measuring technique. In trilateration, the received signal power from known three access points are used to estimate the target position. The distance between the receiver and the transmitter is estimated using a path loss signal propagation model. Then, the trilateration algorithm is applied to the distances to estimate the position. The variation in RSSI over distance due to multi-path effect and shadowing cause accuracy in trilateration but helps to form unique signal strength at different locations. The fingerprinting is an example of scene analysis where it collects signal strength from the environment during offline phase and retrieve those signal strength during online phase. In database fingerprinting, we use the nearest neighbor method for positioning during online phase. Developing the fingerprinting database requires substantial cost and exhaustive labour work. The localization accuracy is significantly affected by training points (e.g., improvising with the number of training points). Also, the nearest neighbor positioning method requires more computational time. These can be overcome by limiting the location estimates (reference points) and complete the database using interpolation of readings taken at the training points. We have used polynomial interpolation model because it provide a compact and explicit functional relationship between the response and the independent variables. It is also relatively straightforward and computationally inexpensive with least square methods. The result of experiments shows that the database fingerprinting method has more accuracy than the other two systems where the localization error has a tolerance of 2m for 93% of its total estimations. But this system can only estimate the reference points and nothing in between. The proposed polynomial interpolation method has registered a localization error of less than 3m for 71% of its total estimation. It has less computational time than database fingerprinting method while computing the positioning algorithms.
Accuracy of all systems
| Positioning Algorithms | Error % in meter | ||
|---|---|---|---|
| 1m | 2m | 3m | |
| Trilateration | 10% | 20% | 29% |
| Database Fingerprinting | 61% | 93% | 93% |
| Interpolation | 27% | 55% | 71% |
| Combined | 46% | 70% | 92% |
The two fingerprinting methods have been combined to utilize their individual advantage and this results in a localization error of 3m for 92% of its estimation. The trilateration has poor accuracy and can be implemented in open halls where the system cannot be affected by multi-path effects.
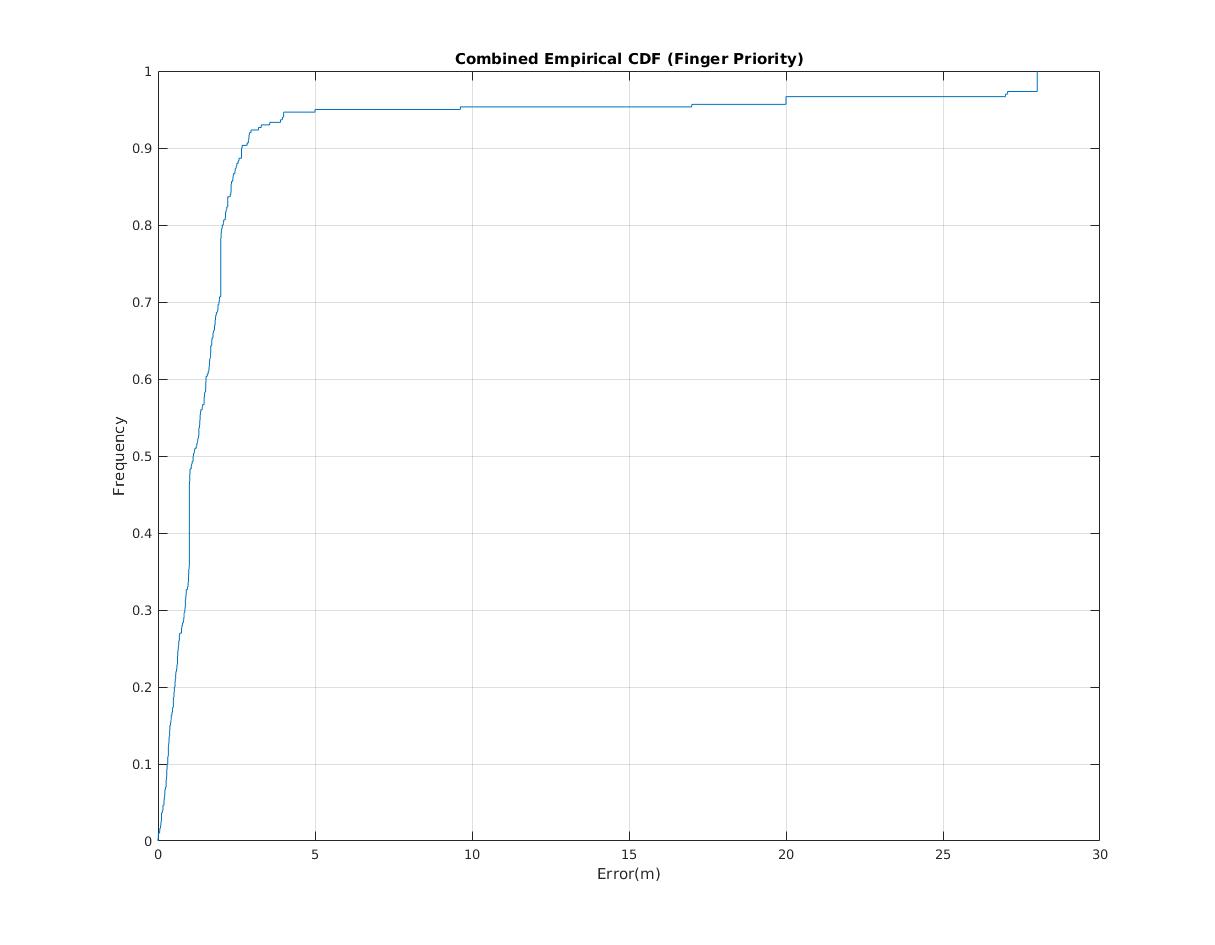
Fig 1:Empirical CDF error of database and interpolation (combined) methods