
index.html
Mapping and Localization for Indoor Mobile Robot Based on RGB-D Camera
Supervisors :
Prof. Dr.-Ing. Klaus-Dieter Kuhnert
Dipl.-Inform. Jens Schlemper
Submitted by:
Aya Souliman
Project Aim and Methodology
The main goal of the project is to extend the ability of Carrier robot, which is a wheeled mobile robot has been designed at EZLS institute, University of Siegen since 2015, to do mapping and localization. In addition, to find if the Kinect camera is enough to implement Hector SLAM algorithm or not. To achieve these two goals, a laser scan data has been collected from both the laser scanner sensor and from Kinect camera. Afterwards, Hector SLAM algorithm has been applied. The results of the Hector SLAM algorithm has been compared with the reference plan. Finally the effect of changing Hector SLAM’s parameters has been studied.
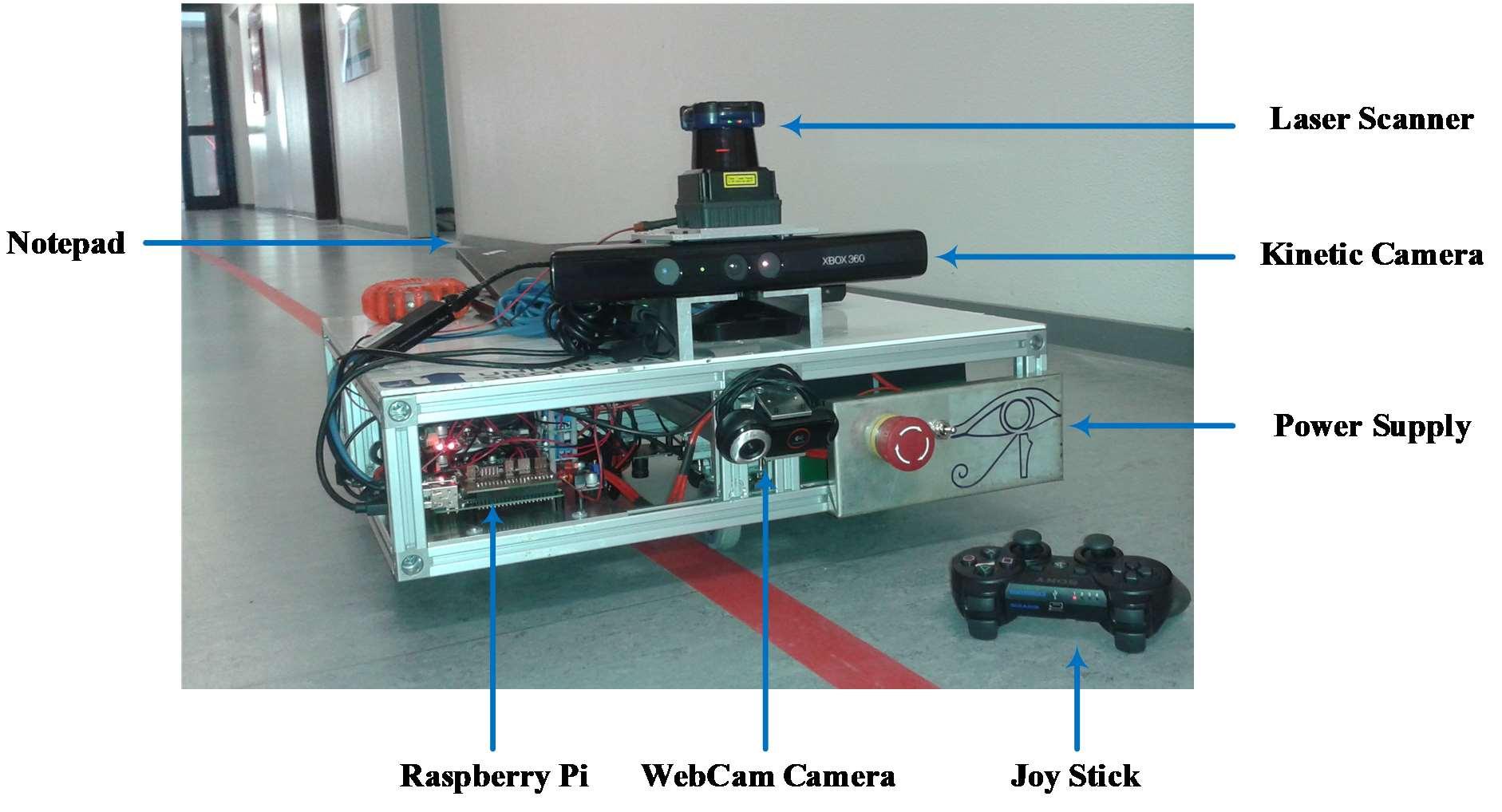
Figure 1: Carrier Robot
System Overview
The system consists mainly of a wheeled mobile robot, Joystick and Notepad. The mobile robot is provided with Raspberry Pi 3, Kinect camera and laser scanner sensor Hokuyo UTM-30LX- EW. The joystick is used to drive the robot manually and to switch between the autonomous modes. It is connected with Raspberry Pi wirelessly by Bluetooth. Since Rviz cannot be run using Raspberry Pi, a Notepad has been used for visualization purposes during real-time testing. The Notepad is connected with Raspberry Pi by Ethernet port. Figure 2 shows a block diagram of the system.
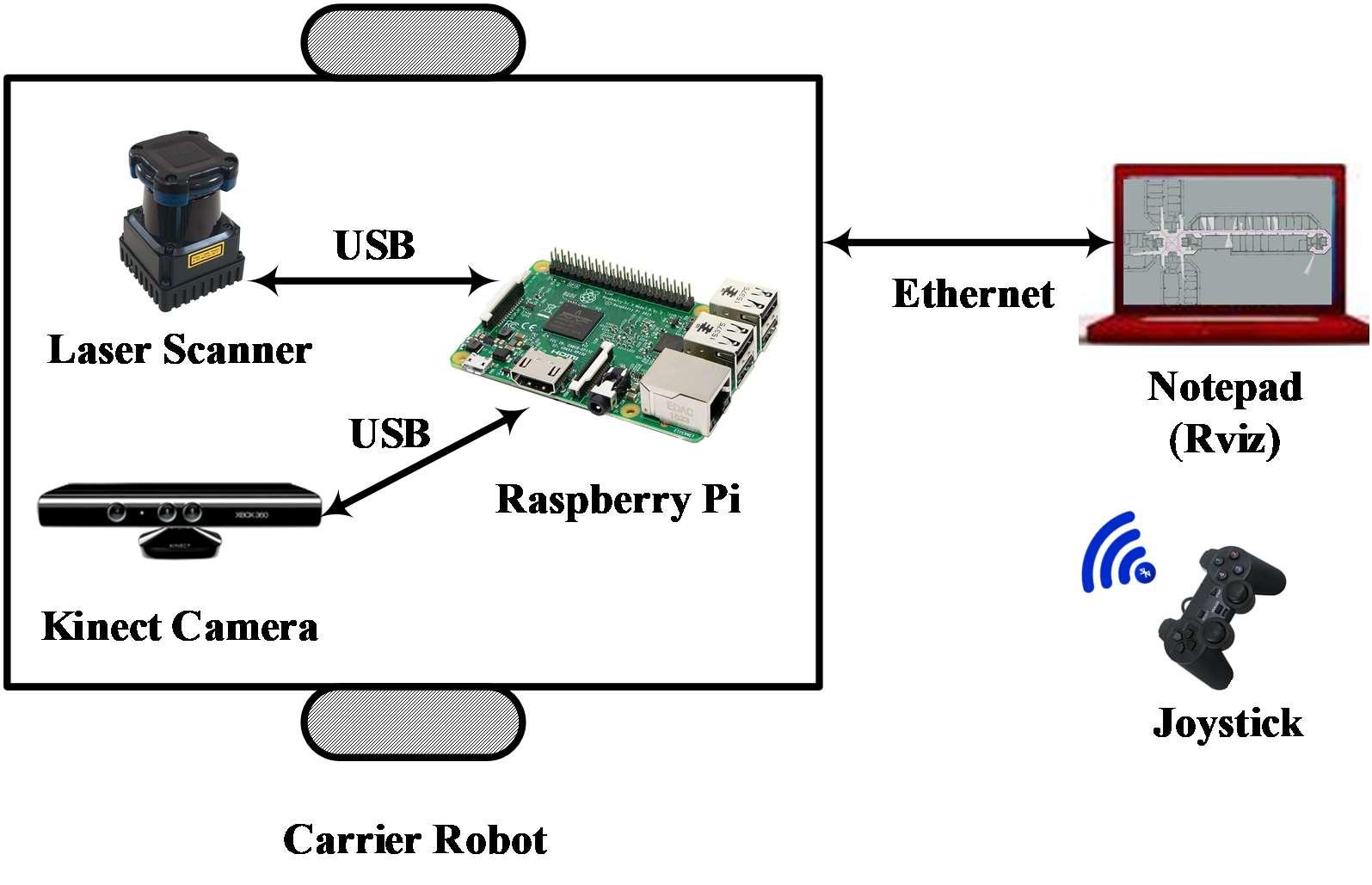
Figure 2: Block Diagram of the System
All algorithms has been implemented using raspberry Pi in ROS framework and Ubuntu Linux operating system. Figure 3 shows a block diagram of the nodes connection. As it is seen, a depth image coming from Kinect camera is converted to a laser scan data by depthimage_to_laserscan node. Depending on scan data and transformer information the Hector SLAM algorithm compute the pose and map. Finally, Rviz is used to visualise the map on Notepad screen.
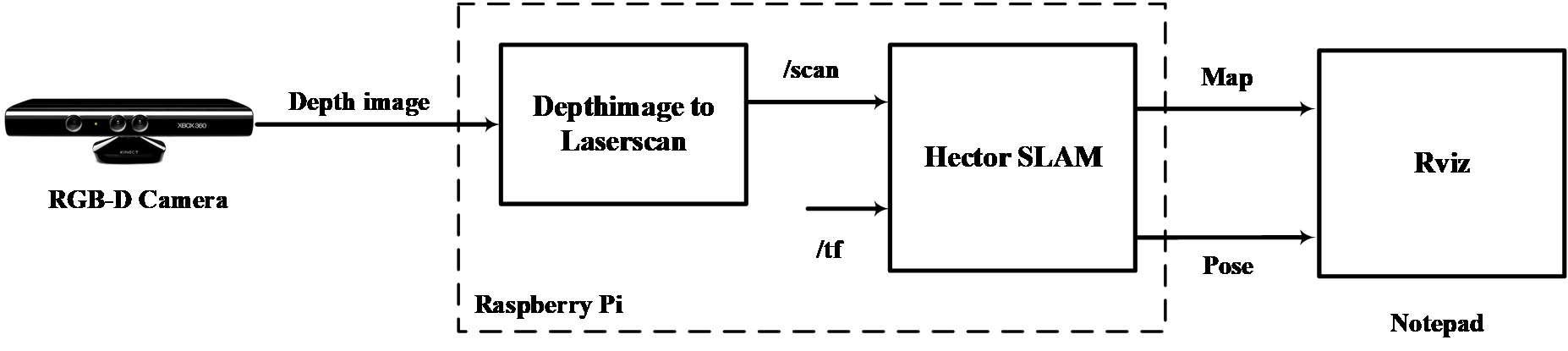
Figure 3: Block Diagram of Hector SLAM Algorithm Based on Kinect Camera.
Results
|
a) Laser Scanner |
b) Kinect Scanner |
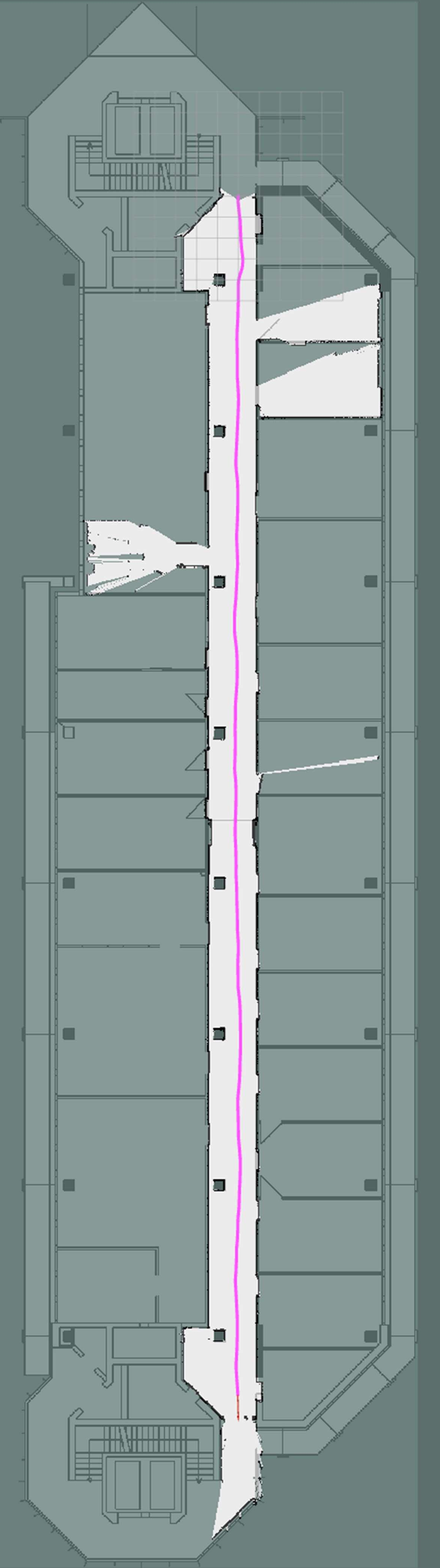
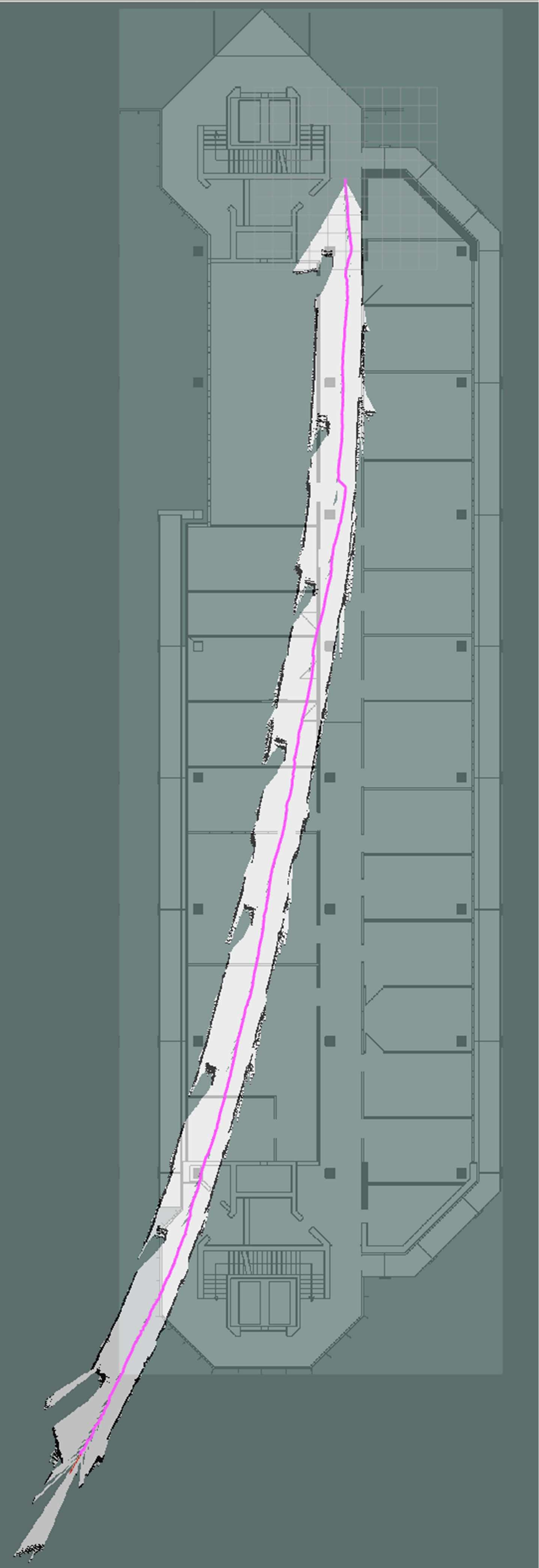
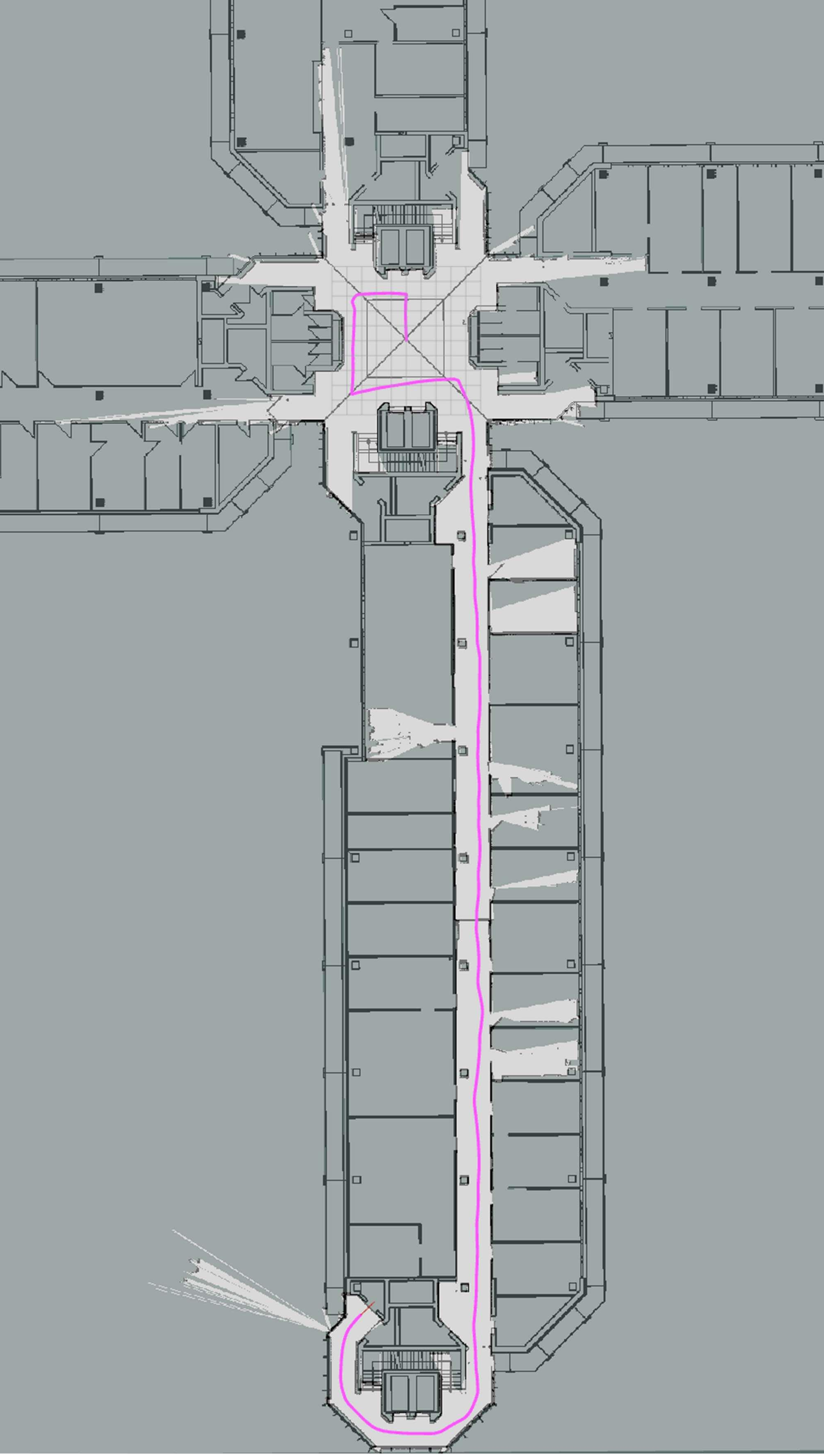
Figure 5: Default Parameters, Entrance and Floor experiments, Laser Scanner
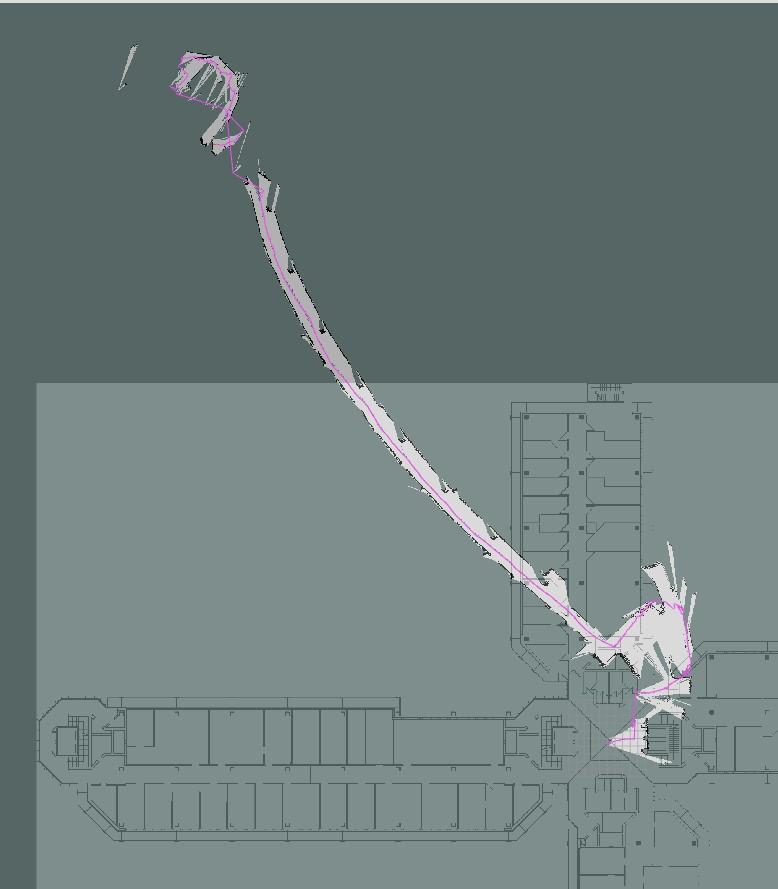
Figure 6: Default Parameters, Entrance and Floor experiments, Kinect Camera
Conclusion
In this project, Hector SLAM algorithm has been implemented on Carrier robot. A comparison in performance of Hector SLAM using Kinect camera and laser scanner has been presented. In addition, the effect of changing Hector SLAM parameters has been studied. From the obtained results, It has been found that laser scanner cannot be replaced with Kinect camera, due to Kinect camera has a small field of view compared to laser scanner sensor in which Hector SLAM algorithm relied on. Small angel means less information about the environment. Hector SLAM algorithm based only on laser information and it does not use any odometry sensors, so the system does not provide explicit loop closing ability. However, using high update rate of modern LIDAR systems like the Hokuyo UTM-30LX, helps the system toovercome this problem, but using Kinect camera could not override it due to missing information about the environment.