Erzeugung von 3D-Terrainaufnahmen zur archäologischen Analyse mittels UAV
Betreuer:
Prof. Dr.-Ing. Klaus-Dieter Kuhnert, Dipl.-Inform. Marc Steven Krämer
Bearbeiter:
Matthias Kölsch
Problemstellung
Im Laufe dieser Masterarbeit wurde eine Unmanned Aerial Vehicle (UAV) Plattform geschaffen, die in der Lage ist, diverse Sensordaten aufzunehmen. Zu den aufgenommenen Daten gehören unter anderem Punktwolken, erstellt von einem LiDAR, sowie Positionsdaten durch ein hoch genaues DGPS. Als ein Anwendungsfall wurde in Zusammenarbeit mit dem Landschaftsverband Westfalen-Lippe die Archäologie gewählt. Unter Zuhilfenahme der Laserscanner Daten wird ein 3D Bild der Erdoberfläche berechnet, welches keine Vegetation oder andere Objekte wie z.B. Strommasten enthält. Mithilfe dieser Daten können Archäologen dann Rückschlüsse auf eine historische Verwendung des aufgenommenen Terrains ziehen. Hierzu mussten die aufgenommenen Daten zunächst analysiert, fusioniert und anschließend gefiltert werden, da für diesen Anwendungsfall Objekte wie Bäume nicht erwünscht waren. An- schließend wurde dann aus diesen Daten ein 3D Modell erzeugt, in dem lediglich der Boden des abgeflogenen Areals zu sehen ist.
Aufnahme und Verarbeitung der Luftaufnahmen
Als Basis für das entwickelte UAV diente ein DJI Bausatz mit einer zulässigen Nutzlast von 6,6 kg. Es wurden verschiedene IMUs und GPS zur Lage- und Positionsbestimmung verwendet. Zur Erfassung der Daten wurden ein Laserscanner von SICK und ein weiterer von Velodyne genutzt, zur Auswertung der Daten kamen verschiedene möglichst kompakte PC Systeme zum Einsatz. Die zulässige Nutzlast war ein einschränkender Faktor, so dass hier viel Optimierung bei der Montage nötig war. Zur Planung der Flüge sollte möglichst Open Source Software zur Verwendung kommen, weshalb die Auswahl auf Mission Planner zur Missionsplanung fiel, da es viele Einstellmöglichkeiten bietet. Die Sensordatenerfassung wurde mit ROS durchgeführt, ebenfalls eine Open Source Software mit vielen verfügbaren Bibliotheken. Nach der Datenaufnahme wurden die Sensordaten transformiert und für jede Punktwolke die Lage der Drohne bestimmt. Die Punktwolken wurden anschließend gefiltert und zu einer großen Punktwolke kombiniert, wobei verschiedene Optimierungen der Rechenzeit nötig waren, da ein Berechnungsdurchgang sonst mehrere Stunden bis einen ganzen Tag in Anspruch nahm. Da sich nach und nach herauskristallisierte, dass einige Optimierungen an der Sensorik nötig waren, nahm dies viel Zeit in Anspruch, da nach jeder Optimierung neue Daten aufgenommen und verarbeitet werden mussten.
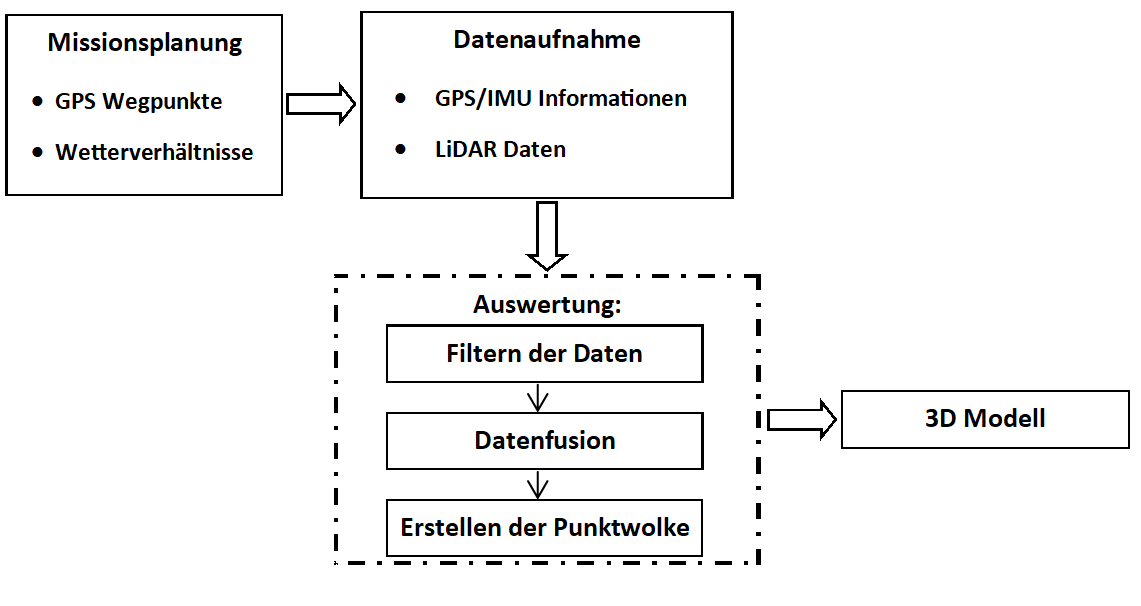
Workflow
Erstellung der 3D Modelle
Nach der abschließenden Optimierung wurden mit den besten Datensätzen verschiedene Algorithmen getestet, um aus den Punktwolken ein 3D-Modell zur erstellen. Hierbei waren je nach aufgenommenen Strukturen unterschiedliche Algorithmen effektiver. Mit Hilfe des Ball-Pivoting Algorithmus ließen sich anschauliche Modelle des Hölderlin Campus erstellen. Für das Bergbaugebiet mussten zuerst die Punktdaten mit Hilfe des CSF-Filters verarbeitet werden, um die Vegetation zu entfernen. An- schließend wurde mit dem Screened Poisson Surface Reconstruction Algorithmus eine Fläche aus den Bodenpunkten erstellt.
|
Ball-Pivoting Algorithmus
|
Poisson Surface Reconstruction Algorithmus
|
|
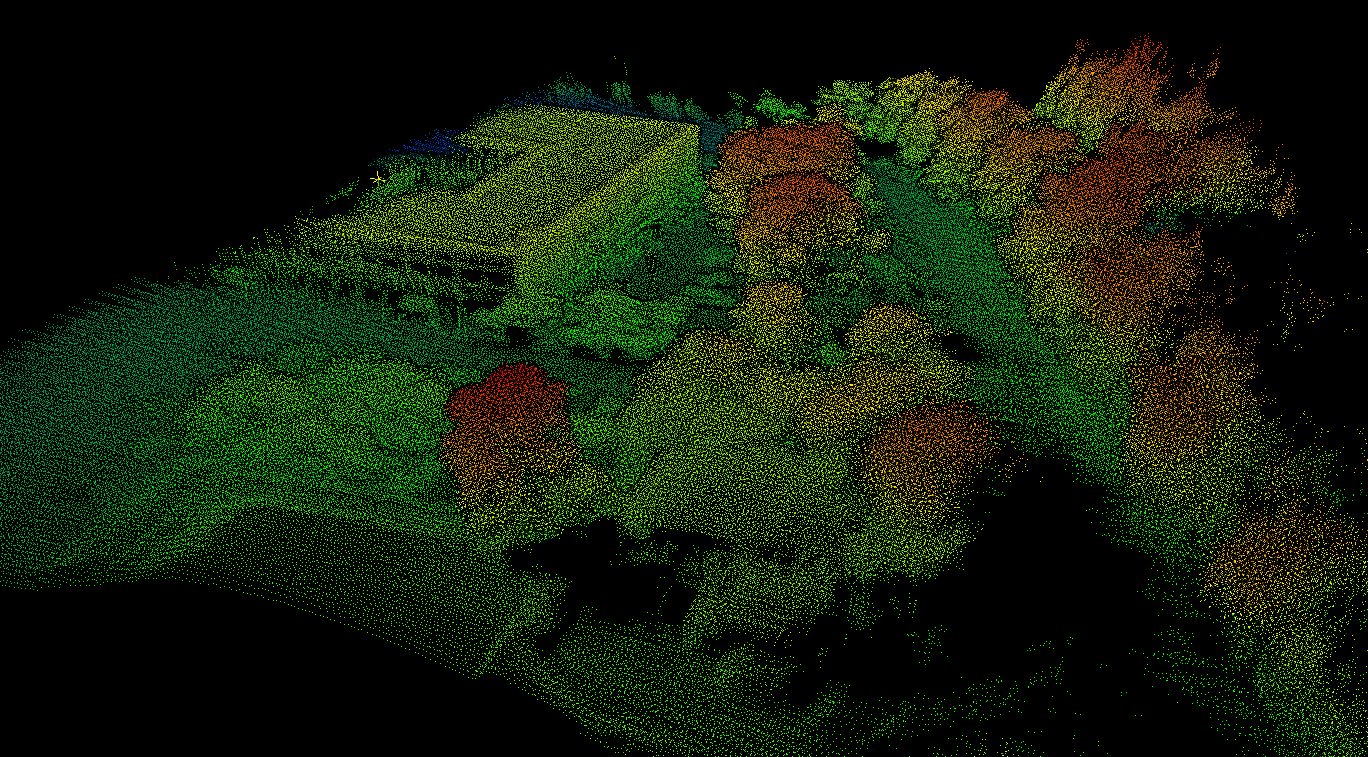
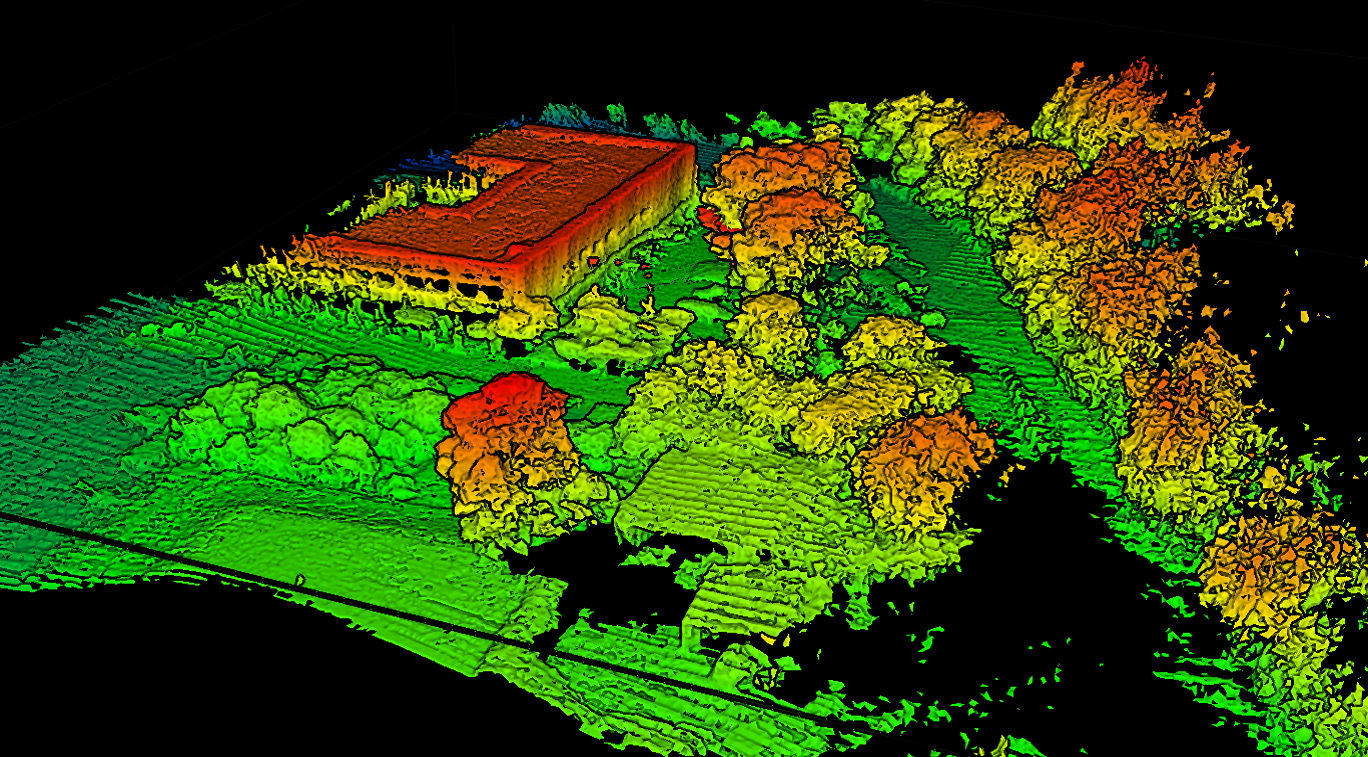
Punktwolke des Hölderlingebäudes
|
3D Modell des Hölderlingebäudes
|
|
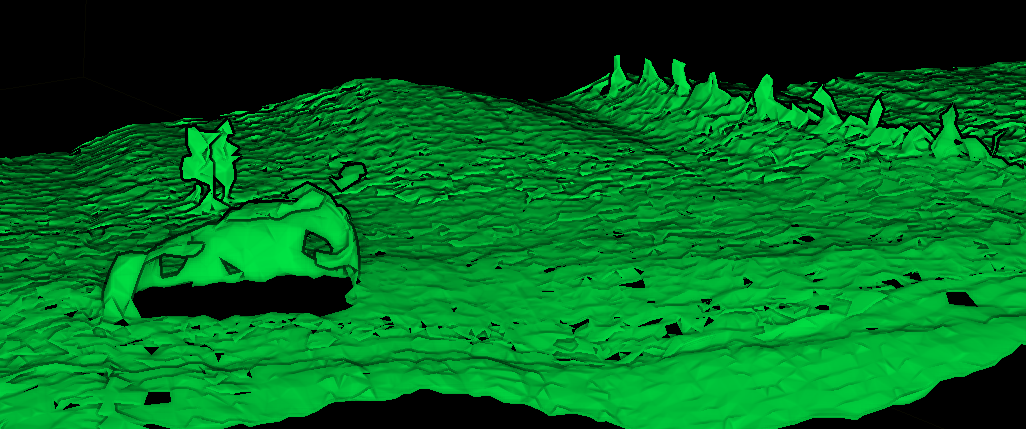
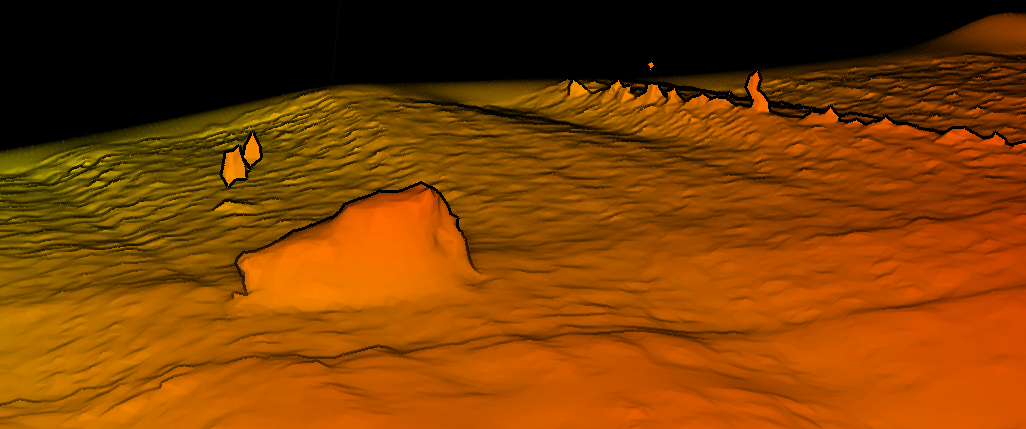
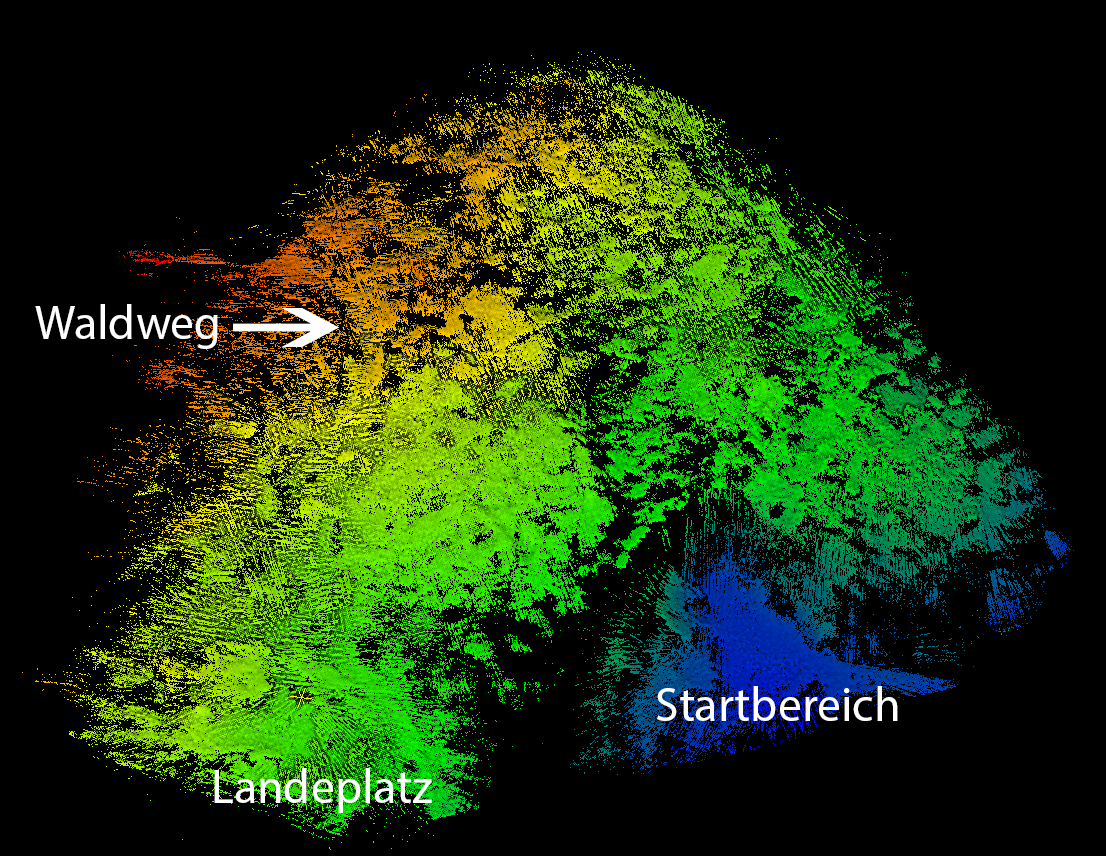
Punktwolke des Müsener Bergbaus
|
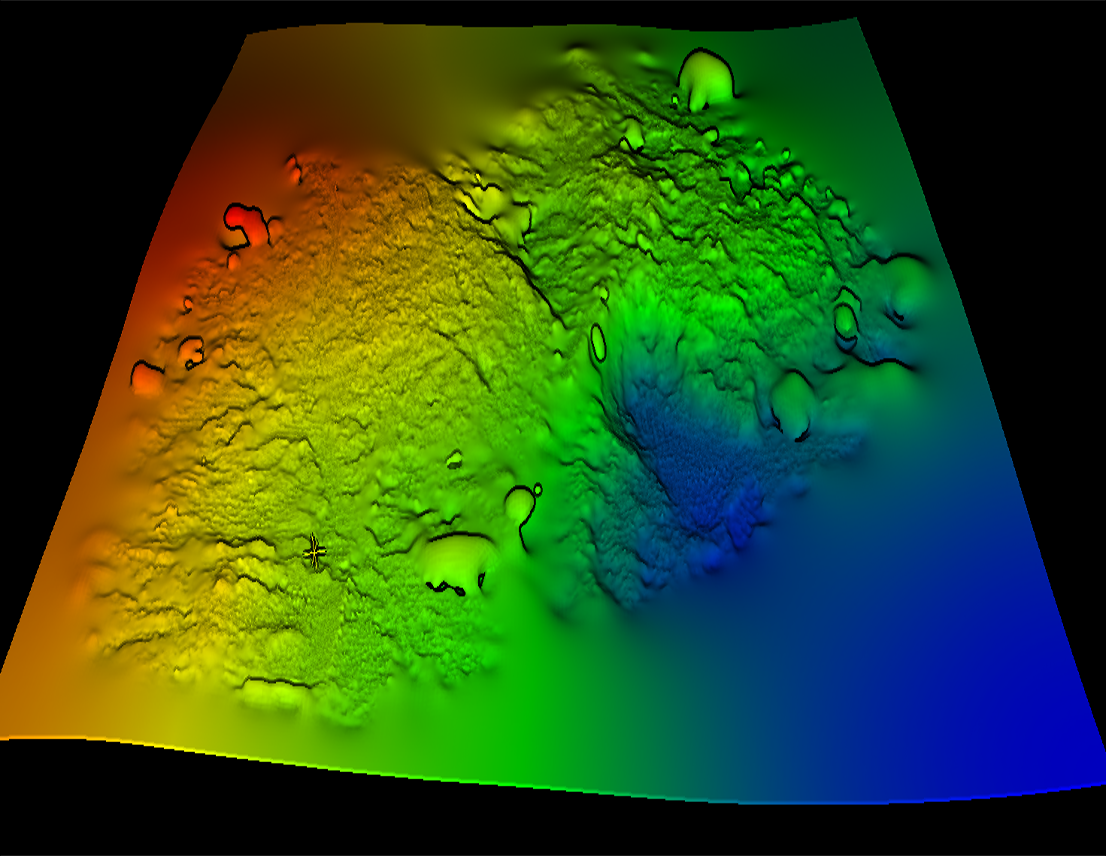
3D Modell des Müsener Bergbaus
|